AC录像转行车线与轨迹分析
Foreword
AC模拟器跑完的结果或者录像一直都有,但是缺少具体分析,也没找到类似的分析工具,不如自己写一个,刚好利用Cursor来完全做一个项目,我不写一行代码,仅仅做分析和指导方向,看看是否AI能实现我的全部要求,也能观察转成AI写代码时,我们的输入到底要做到什么程度,这个东西才足够好用或者能够工程化。
ACReplay2AILine
第一个需求其实是比较简单的,分析acreplay的文件格式,然后将其转变成ideal_line.ai的格式。
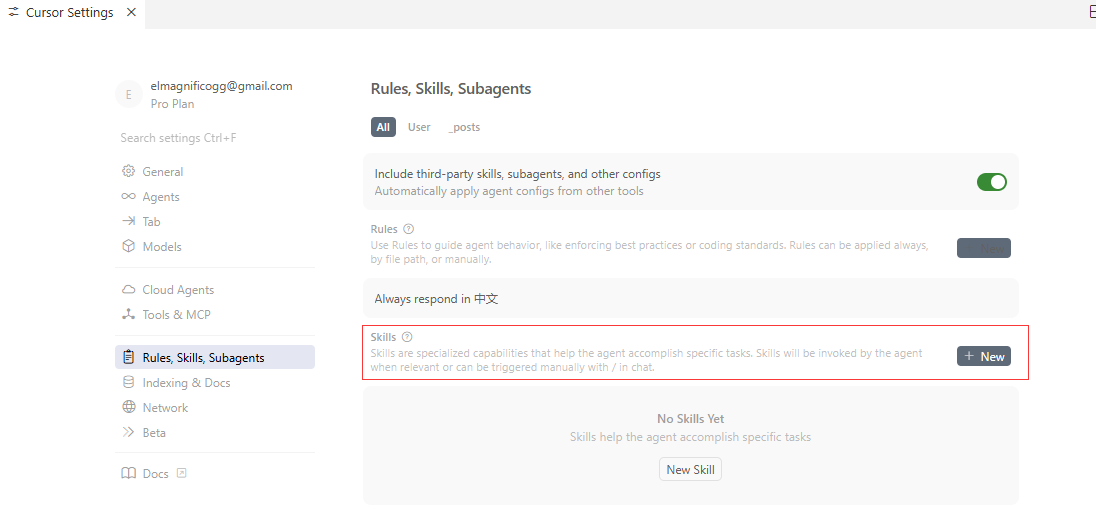
做之前第一步是询问AI,是否能实现将录像轨迹转成AI行车线,AI表示可以,并且给了几个方案,这里我审过以后,确认了基础实现的技术线路。
![]()
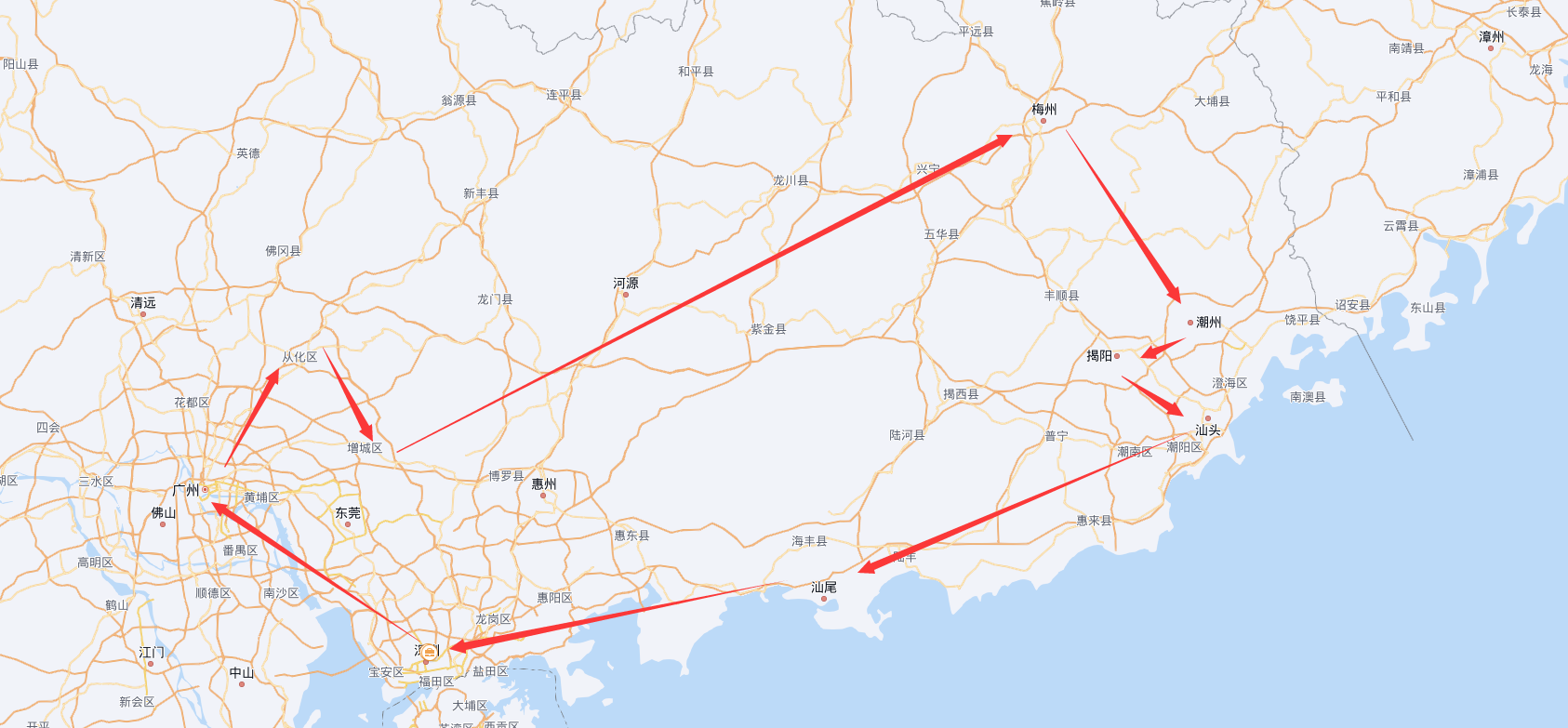
如果要我去找AC相关mod的制作信息并且了解清楚行车线和地图相关数据关系,还是比较耗时的,这里AI直接快速解决了问题。
核心结论就是只要非内置的行车线,就可以自行替代,而现在mod级别都不会内置行车线,恰恰方便了行车线的替换逻辑
当然也问了一下是否能根据车型、参数设置、赛道等等直接生成最优行车线,这里由于数据不全,所以AI回答也比较模糊,实际上AC有类似的Mod,但是那种行车线还是有延迟,而且不是很准。
接着就是先做一个最小的MVP,给出最核心的需求,先看一下是否能够实现。
根据回放1.388.acreplay文件转成zhuhai\data\ideal_line.ai格式,并替代
实际上给出这些命令,Cursor就已经完成了核心转换逻辑,实际测试确实替代了老的行车线,但是行车线还存在一些重复的部分并且刹车和油门的提示是错误的,但是轨迹基本都是正确的。
- 仔细回看,实际上给出来的命令并没有说明要做到刹车油门提示正确,只是说替换一个轨迹而已,所以AI也只是做了这么多内容
基于上面的逻辑,让AI补充提取逻辑
结合记录中的刹车和油门信号,补充到行车线中使用红色或者绿色提示
到这一步,AI直接理解了,并且刹车和油门提示正确了,但是还是有问题,acreplay中飞行圈有时候不一定是第一圈,存在半圈或者开场圈的一点点路径,AI把这部分内容也弄进去,导致一部分轨迹是错误的
根据记录的计时点开始和结束位置,提取轨迹路径
给完这个以后,AI自动理解了计时开始应该从0,结束的时间应该比较长,到这里提取出来的轨迹就是相对完美的了,实际生成的ideal_line.ai已经是我要的轨迹线了
给出更多acreplay文件进行测试,AI自动发现了飞行圈选择的问题,他自己增加了参数选择第n圈,但是实际上我们需要的是最快圈速的那一圈,这一步应该自动选择,而不是还要用户输入
自动识别acreplay中圈速最快的一圈作为提取的轨迹
到这里ACReplay2AILine就完全正常工作了
#Requires -Version 5.1
<#
.SYNOPSIS
用 acrp 解析录像,将轨迹写入任意赛道的 data\ideal_line.ai(版本 7)。
.DESCRIPTION
简易用法(acrp.exe 与脚本同目录为默认):
powershell -ExecutionPolicy Bypass -File .\BuildIdealLineFromReplay.ps1 `
-Replay "C:\path\lap.acreplay" -TrackFolder "C:\...\content\tracks\zhuhai"
多车手录像请指定 -DriverName。已导出 JSON 时可省略 -Replay,改用 -JsonPath。
-TrackFolder: 赛道根目录(其下应有 data\ideal_line.ai,除非用 -IdealLinePath 覆盖)。
-AcRpPath: 默认 = 脚本目录\acrp.exe
路径可为绝对路径(如 C:\...\x.acreplay)、相对当前目录、或 ~ 开头(用户主目录);首尾引号会自动去掉。
轨迹与赛道:ideal_line 只按录像里的世界坐标 x/y/z 重采样,与「目标赛道文件夹」无自动校验,
请自行保证录像对应该赛道。计时线模式:在起点 currentLap 等于 -Lap 的若干区间中,直接取弧长最长的一段作为一圈(出场短段自然被排除)。
-Lap 对应录像 JSON 里的 currentLap 整型(通常第 1 圈=0,第 2 圈=1 …),不限于 0/1;第 N 圈飞行一般传 N-1。
不确定时用 -ShowLapHints 列出每个计时区间起点的 currentLap。
#>
[CmdletBinding()]
param(
[string]$Replay,
[string]$TrackFolder,
[string]$AcRpPath,
[string]$DriverName,
[string]$JsonPath,
[string]$CsvPath,
[string]$IdealLinePath,
[int]$Lap = 0,
[bool]$UseTimingLine = $true,
[double]$MinSegmentMeters = 50.0,
[double]$DedupePlanarMin = 0.05,
[switch]$WhatIf,
[switch]$KeepTempJson,
[switch]$ShowLapHints
)
Set-StrictMode -Version Latest
$ErrorActionPreference = 'Stop'
function Resolve-FsPath([string]$Path) {
if ($null -eq $Path -or [string]::IsNullOrWhiteSpace($Path)) { return $Path }
$p = $Path.Trim()
while ($p.Length -ge 2 -and $p.StartsWith('"') -and $p.EndsWith('"')) {
$p = $p.Substring(1, $p.Length - 2).Trim()
}
if ($p.StartsWith('~')) {
$rest = $p.Substring(1).TrimStart('\', '/')
$p = if ($rest) { Join-Path $HOME $rest } else { $HOME }
}
return [IO.Path]::GetFullPath($p)
}
function Show-Usage {
Write-Host @"
用法:
BuildIdealLineFromReplay.ps1 -Replay <录像.acreplay> -TrackFolder <赛道文件夹> [选项]
必填(二选一):
-Replay Assetto Corsa 录像路径
-TrackFolder 赛道根目录(内含 data\ideal_line.ai)
或已手动用 acrp 导出:
-JsonPath / -CsvPath 与 -IdealLinePath(或 -TrackFolder)
常用选项:
-DriverName 多车时指定车手名(传给 acrp --driver-name)
-AcRpPath 默认: 脚本所在目录\acrp.exe
-IdealLinePath 默认: <TrackFolder>\data\ideal_line.ai
-Lap 与录像 currentLap 一致(第 2 圈多为 1,第 3 圈多为 2,依此类推)
-ShowLapHints 只打印计时线分段与每段起点 currentLap,不写 ideal_line(仅需 JSON)
-MinSegmentMeters 计时线模式下,若「该 Lap 最长区间」弧长仍小于此值(m)则放弃切段(防数据损坏),默认 50
-UseTimingLine:`$false 关闭计时线截取
-WhatIf 只预览不写文件
示例:
powershell -ExecutionPolicy Bypass -File .\BuildIdealLineFromReplay.ps1 `
-Replay ".\my.acreplay" -TrackFolder "..\zhuhai"
"@
}
$scriptDir = $null
if ($PSCommandPath) {
$scriptDir = Split-Path -LiteralPath $PSCommandPath
} elseif ($PSScriptRoot) {
$scriptDir = $PSScriptRoot
} else {
try {
$exePath = [System.Diagnostics.Process]::GetCurrentProcess().MainModule.FileName
if ($exePath -and (Test-Path -LiteralPath $exePath)) {
$scriptDir = Split-Path -LiteralPath $exePath
}
} catch { }
if (-not $scriptDir) {
$a0 = [Environment]::GetCommandLineArgs()[0]
if ($a0 -and (Test-Path -LiteralPath $a0)) {
$scriptDir = Split-Path -LiteralPath $a0
} else {
$scriptDir = (Get-Location).Path
}
}
}
if (-not $scriptDir) { throw 'Cannot resolve script directory (expected exe or .ps1 path).' }
if (-not $AcRpPath -or [string]::IsNullOrWhiteSpace($AcRpPath)) {
$AcRpPath = Join-Path $scriptDir 'acrp.exe'
} else {
$AcRpPath = Resolve-FsPath $AcRpPath
}
$useJson = $false
$tempWork = $null
if ($Replay) {
if (-not $TrackFolder) { throw "使用 -Replay 时必须同时指定 -TrackFolder(赛道根目录)。" }
if (-not (Test-Path -LiteralPath $AcRpPath)) {
throw "找不到 acrp.exe: $AcRpPath (可设置 -AcRpPath,或把 acrp.exe 放在脚本同目录)"
}
$replayFull = Resolve-FsPath $Replay
if (-not (Test-Path -LiteralPath $replayFull)) { throw "找不到录像: $replayFull" }
$trackFull = Resolve-FsPath $TrackFolder
if (-not (Test-Path -LiteralPath $trackFull -PathType Container)) {
throw "赛道目录不存在: $trackFull"
}
if (-not $IdealLinePath) {
# "指定在哪里就在哪里":默认不再强制落到 data 子目录。
$IdealLinePath = Resolve-FsPath (Join-Path $trackFull 'ideal_line.ai')
} else {
# 相对路径按当前工作目录解析,不再强制挂到 TrackFolder。
$IdealLinePath = Resolve-FsPath $IdealLinePath
}
$tempWork = Join-Path ([IO.Path]::GetTempPath()) ('ac_ideal_' + [guid]::NewGuid().ToString('N'))
New-Item -ItemType Directory -Path $tempWork -Force | Out-Null
$outPrefix = Join-Path $tempWork 'acrp_out'
$argList = New-Object System.Collections.Generic.List[string]
[void]$argList.Add('-o')
[void]$argList.Add($outPrefix)
if ($DriverName) {
[void]$argList.Add('--driver-name')
[void]$argList.Add($DriverName)
}
[void]$argList.Add($replayFull)
Write-Host "运行 acrp: $AcRpPath"
$proc = Start-Process -FilePath $AcRpPath -ArgumentList $argList.ToArray() -Wait -PassThru -NoNewWindow
if ($proc.ExitCode -ne 0) {
if (-not $KeepTempJson) { Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue }
throw "acrp.exe 退出码 $($proc.ExitCode)"
}
$jsonFiles = @(Get-ChildItem -LiteralPath $tempWork -Filter *.json -File | Sort-Object LastWriteTime -Descending)
if ($jsonFiles.Count -eq 0) {
if (-not $KeepTempJson) { Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue }
throw "acrp 未在临时目录生成 JSON: $tempWork"
}
if ($jsonFiles.Count -gt 1 -and -not $DriverName) {
if (-not $KeepTempJson) { Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue }
throw "生成多个 JSON(多车?),请添加 -DriverName 指定车手。文件: $($jsonFiles.Name -join ', ')"
}
$JsonPath = $jsonFiles[0].FullName
Write-Host "已解析: $JsonPath"
$useJson = $true
} elseif ($JsonPath -or $CsvPath) {
if ($JsonPath -and $CsvPath) { throw "请只指定 -JsonPath 或 -CsvPath 其中之一。" }
if ($JsonPath) {
$JsonPath = Resolve-FsPath $JsonPath
if (-not (Test-Path -LiteralPath $JsonPath)) { throw "找不到 JSON: $JsonPath" }
$useJson = $true
} else {
$CsvPath = Resolve-FsPath $CsvPath
if (-not (Test-Path -LiteralPath $CsvPath)) { throw "找不到 CSV: $CsvPath" }
}
if (-not $IdealLinePath) {
if (-not $TrackFolder) {
if ($ShowLapHints -and $JsonPath) {
$IdealLinePath = Join-Path ([IO.Path]::GetTempPath()) '_BuildIdealLine_skip.ai'
} else {
throw "使用 -JsonPath/-CsvPath 且未指定 -IdealLinePath 时,需要 -TrackFolder。"
}
} else {
# "指定在哪里就在哪里":默认不再强制落到 data 子目录。
$IdealLinePath = Resolve-FsPath (Join-Path (Resolve-FsPath $TrackFolder) 'ideal_line.ai')
}
} else {
# 相对路径按当前工作目录解析,不再依赖 TrackFolder 作为基准。
$IdealLinePath = Resolve-FsPath $IdealLinePath
}
} else {
Show-Usage
throw "请提供 -Replay 与 -TrackFolder,或提供 -JsonPath / -CsvPath。"
}
if (-not $ShowLapHints) {
if (-not (Test-Path -LiteralPath $IdealLinePath) -and $TrackFolder) {
$trackBase = Resolve-FsPath $TrackFolder
$fallbackTemplate = Join-Path $trackBase 'data\ideal_line.ai'
if (Test-Path -LiteralPath $fallbackTemplate) {
$outDir = Split-Path -Parent $IdealLinePath
if ($outDir -and -not (Test-Path -LiteralPath $outDir)) {
New-Item -ItemType Directory -Path $outDir -Force | Out-Null
}
Copy-Item -LiteralPath $fallbackTemplate -Destination $IdealLinePath -Force
Write-Host "未找到目标 ideal_line.ai,已从模板复制: $fallbackTemplate -> $IdealLinePath"
}
}
if (-not (Test-Path -LiteralPath $IdealLinePath)) {
if ($tempWork -and -not $KeepTempJson) { Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue }
throw "找不到 ideal_line.ai: $IdealLinePath"
}
}
# --- 解析轨迹并写 ideal_line ---
function Parse-CsvLine([string]$line) {
$cells = New-Object System.Collections.Generic.List[string]
$cur = New-Object System.Text.StringBuilder
$inQ = $false
for ($i = 0; $i -lt $line.Length; $i++) {
$c = $line[$i]
if ($c -eq '"') {
$inQ = -not $inQ
} elseif (($c -eq ',') -and -not $inQ) {
[void]$cells.Add($cur.ToString())
[void]$cur.Clear()
} else {
[void]$cur.Append($c)
}
}
[void]$cells.Add($cur.ToString())
return ,$cells.ToArray()
}
function Get-SfCrossingIndices($j) {
$cross = New-Object System.Collections.Generic.List[int]
$nF = $j.currentLapTime.Count
for ($i = 1; $i -lt $nF; $i++) {
$a = [int]$j.currentLapTime[$i - 1]
$b = [int]$j.currentLapTime[$i]
$lapInc = [int]$j.currentLap[$i] - [int]$j.currentLap[$i - 1]
if (($a - $b -gt 500) -or ($lapInc -gt 0)) {
$prev = if ($cross.Count -gt 0) { $cross[$cross.Count - 1] } else { -9999 }
if (($i - $prev) -gt 2) { [void]$cross.Add($i) }
}
}
return $cross
}
function Measure-ArcJson($j, [int]$i0, [int]$i1Exclusive) {
$s = 0.0
$px = $null; $py = $null; $pz = $null
for ($i = $i0; $i -lt $i1Exclusive; $i++) {
$x = [double]$j.x[$i]; $y = [double]$j.y[$i]; $z = [double]$j.z[$i]
if ($null -ne $px) {
$dx = $x - $px; $dy = $y - $py; $dz = $z - $pz
$s += [Math]::Sqrt($dx * $dx + $dy * $dy + $dz * $dz)
}
$px = $x; $py = $y; $pz = $z
}
return $s
}
function Select-TimingSegment($j, [int]$Lap, [double]$MinSegmentMeters) {
$cross = Get-SfCrossingIndices $j
if ($cross.Count -lt 2) {
return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_crossings' }
}
$bestLen = -1.0
$bestA = -1
$bestB = -1
for ($k = 0; $k -lt $cross.Count - 1; $k++) {
$a = $cross[$k]
$b = $cross[$k + 1]
if ([int]$j.currentLap[$a] -ne $Lap) { continue }
$len = Measure-ArcJson $j $a $b
if ($len -gt $bestLen) {
$bestLen = $len
$bestA = $a
$bestB = $b
}
}
if ($bestA -lt 0) {
return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_match' }
}
if ($bestLen -lt $MinSegmentMeters) {
return @{ Start = -1; End = -1; Length = $bestLen; Mode = 'segment_too_short' }
}
return @{ Start = $bestA; End = $bestB; Length = $bestLen; Mode = 'longest_for_lap' }
}
if ($ShowLapHints) {
if (-not $useJson) { throw "-ShowLapHints 仅支持 JSON(-Replay 或 -JsonPath),不支持 CSV。" }
$jh = Get-Content -LiteralPath $JsonPath -Raw -Encoding UTF8 | ConvertFrom-Json
if (-not $jh.currentLap -or -not $jh.currentLapTime) {
throw "JSON 缺少 currentLap 或 currentLapTime,无法分析计时线。"
}
$nH = $jh.currentLap.Count
if ($jh.currentLapTime.Count -ne $nH) { throw "currentLap 与 currentLapTime 长度不一致。" }
$xc = Get-SfCrossingIndices $jh
Write-Host "=== ShowLapHints: $JsonPath ==="
Write-Host "帧数=$nH 检测到计时线交叉索引数=$($xc.Count)"
Write-Host "(过线后该帧的 currentLap 即「已开始计时的那一圈」编号,通常从 0 递增)"
for ($ki = 0; $ki -lt $xc.Count; $ki++) {
$ix = $xc[$ki]
Write-Host (" 交叉#{0}: frame={1} currentLap={2} currentLapTime={3} ms" -f $ki, $ix, [int]$jh.currentLap[$ix], [int]$jh.currentLapTime[$ix])
}
for ($ki = 0; $ki -lt $xc.Count - 1; $ki++) {
$a = $xc[$ki]
$b = $xc[$ki + 1]
$alen = Measure-ArcJson $jh $a $b
$lapAtStart = [int]$jh.currentLap[$a]
Write-Host (" 区间 frame {0}..{1}: 起点 currentLap={2} 弧长约 {3:F1} m (同 Lap 多段时脚本取最长段)" -f $a, $b, $lapAtStart, $alen)
}
Write-Host "当前默认 -Lap=$Lap;若飞行圈是「第 3 圈」且 AC 从 0 编号,多为 -Lap 2。"
if ($tempWork -and (Test-Path -LiteralPath $tempWork) -and -not $KeepTempJson) {
Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue
}
exit 0
}
try {
$pts = New-Object System.Collections.Generic.List[object]
$hasPedals = $false
$timingMode = 'n/a'
if ($useJson) {
$j = Get-Content -LiteralPath $JsonPath -Raw -Encoding UTF8 | ConvertFrom-Json
if (-not $j.x -or -not $j.y -or -not $j.z) { throw "JSON 缺少 x/y/z 数组(请确认为 acrp 导出)。" }
if (-not $j.currentLap) { throw "JSON 缺少 currentLap 数组。" }
$nF = $j.x.Count
if ($j.y.Count -ne $nF -or $j.z.Count -ne $nF -or $j.currentLap.Count -ne $nF) {
throw "JSON 中 x/y/z/currentLap 长度不一致。"
}
if ($j.gas -and $j.brake -and ($j.gas.Count -eq $nF) -and ($j.brake.Count -eq $nF)) {
$hasPedals = $true
}
$iStart = 0
$iEnd = $nF
$timingUsed = $false
if (-not $UseTimingLine) {
$timingMode = 'timing_disabled'
} elseif ($j.currentLapTime -and ($j.currentLapTime.Count -eq $nF)) {
$seg = Select-TimingSegment $j $Lap $MinSegmentMeters
if ($seg.Start -ge 0) {
$iStart = $seg.Start
$iEnd = $seg.End
$timingUsed = $true
$timingMode = $seg.Mode
} elseif ($seg.Mode -eq 'segment_too_short') {
$timingMode = 'segment_too_short'
Write-Warning ("计时线切段: 该 Lap 下最长区间仅 {0:F1} m,低于 -MinSegmentMeters ({1} m),已放弃切段。可调小 -MinSegmentMeters 或检查录像。" -f $seg.Length, $MinSegmentMeters)
} elseif ($seg.Mode -eq 'no_crossings') {
$timingMode = 'no_crossings'
Write-Warning "录像中未检测到计时线交叉(currentLapTime/圈数变化),已按整段 -Lap 过滤取点。"
} else {
$timingMode = 'lap_filter_pending'
}
} else {
$timingMode = 'no_currentLapTime'
Write-Warning "JSON 无 currentLapTime 或与帧数不一致,已跳过计时线切段,仅按 -Lap 过滤。"
}
for ($i = $iStart; $i -lt $iEnd; $i++) {
if (-not $timingUsed) {
if ([int]$j.currentLap[$i] -ne $Lap) { continue }
}
$g = if ($hasPedals) { [int]$j.gas[$i] } else { 0 }
$bk = if ($hasPedals) { [int]$j.brake[$i] } else { 0 }
if ($g -lt 0) { $g = 0 } elseif ($g -gt 255) { $g = 255 }
if ($bk -lt 0) { $bk = 0 } elseif ($bk -gt 255) { $bk = 255 }
[void]$pts.Add([pscustomobject]@{
X = [float][double]$j.x[$i]
Y = [float][double]$j.y[$i]
Z = [float][double]$j.z[$i]
G = $g
Bk = $bk
})
}
if ($UseTimingLine -and -not $timingUsed) {
if ($timingMode -eq 'lap_filter_pending') { $timingMode = 'no_segment_for_lap' }
Write-Warning "未找到起点 currentLap=$Lap 的计时区间(或交叉点不足),已回退为整段 Lap 过滤。可运行 -ShowLapHints 查看每段起点应对的 -Lap,或 -UseTimingLine:`$false。"
}
} else {
$timingMode = 'csv'
$hdr = Get-Content -LiteralPath $CsvPath -TotalCount 1 -Encoding UTF8
$names = Parse-CsvLine $hdr
$ixX = [array]::IndexOf($names, 'position.x')
$ixY = [array]::IndexOf($names, 'position.y')
$ixZ = [array]::IndexOf($names, 'position.z')
$ixLap = [array]::IndexOf($names, 'currentLap')
$ixGas = [array]::IndexOf($names, 'gas')
$ixBrake = [array]::IndexOf($names, 'brake')
if ($ixX -lt 0 -or $ixY -lt 0 -or $ixZ -lt 0) { throw "CSV 缺少 position.x/y/z 列,请确认由 acreplay-parser 导出。" }
if ($ixLap -lt 0) { throw "CSV 缺少 currentLap 列。" }
if ($ixGas -ge 0 -and $ixBrake -ge 0) { $hasPedals = $true }
$reader = [IO.StreamReader]::new($CsvPath, [Text.Encoding]::UTF8, $true)
try {
[void]$reader.ReadLine()
while ($null -ne ($line = $reader.ReadLine())) {
if ([string]::IsNullOrWhiteSpace($line)) { continue }
$c = Parse-CsvLine $line
if ($c.Count -le [Math]::Max($ixX, [Math]::Max($ixY, [Math]::Max($ixZ, $ixLap)))) { continue }
$lapVal = 0
[void][int]::TryParse($c[$ixLap].Trim(), [ref]$lapVal)
if ($lapVal -ne $Lap) { continue }
$x = [double]::Parse($c[$ixX].Trim(), [Globalization.CultureInfo]::InvariantCulture)
$y = [double]::Parse($c[$ixY].Trim(), [Globalization.CultureInfo]::InvariantCulture)
$z = [double]::Parse($c[$ixZ].Trim(), [Globalization.CultureInfo]::InvariantCulture)
$g = 0; $bk = 0
if ($hasPedals) {
[void][int]::TryParse($c[$ixGas].Trim(), [ref]$g)
[void][int]::TryParse($c[$ixBrake].Trim(), [ref]$bk)
}
if ($g -lt 0) { $g = 0 } elseif ($g -gt 255) { $g = 255 }
if ($bk -lt 0) { $bk = 0 } elseif ($bk -gt 255) { $bk = 255 }
[void]$pts.Add([pscustomobject]@{ X = [float]$x; Y = [float]$y; Z = [float]$z; G = $g; Bk = $bk })
}
} finally { $reader.Close() }
}
if ($DedupePlanarMin -gt 0 -and $pts.Count -gt 2) {
$dd = New-Object System.Collections.Generic.List[object]
[void]$dd.Add($pts[0])
for ($di = 1; $di -lt $pts.Count; $di++) {
$a = $dd[$dd.Count - 1]
$b = $pts[$di]
$dh = [Math]::Sqrt([double](($b.X - $a.X) * ($b.X - $a.X) + ($b.Z - $a.Z) * ($b.Z - $a.Z)))
if ($dh -ge $DedupePlanarMin) { [void]$dd.Add($b) }
}
$pts = $dd
}
if ($pts.Count -lt 200) { throw "该圈采样点过少 ($($pts.Count)),请检查 -DriverName / -Lap / -UseTimingLine。" }
$clean = New-Object System.Collections.Generic.List[object]
[void]$clean.Add($pts[0])
for ($i = 1; $i -lt $pts.Count; $i++) {
$a = $clean[$clean.Count - 1]
$b = $pts[$i]
$d = [Math]::Sqrt([double](($b.X - $a.X) * ($b.X - $a.X) + ($b.Z - $a.Z) * ($b.Z - $a.Z)))
if ($d -lt 80.0) { [void]$clean.Add($b) }
}
$pts = $clean
if ($pts.Count -lt 200) { throw "过滤跳变后点数不足 ($($pts.Count))。" }
$segLen = New-Object double[] ($pts.Count)
$cum = New-Object double[] ($pts.Count)
$cum[0] = 0.0
for ($i = 1; $i -lt $pts.Count; $i++) {
$dx = [double]$pts[$i].X - [double]$pts[$i - 1].X
$dy = [double]$pts[$i].Y - [double]$pts[$i - 1].Y
$dz = [double]$pts[$i].Z - [double]$pts[$i - 1].Z
$segLen[$i] = [Math]::Sqrt($dx * $dx + $dy * $dy + $dz * $dz)
$cum[$i] = $cum[$i - 1] + $segLen[$i]
}
$replayTotal = $cum[$pts.Count - 1]
if ($replayTotal -lt 100.0) { throw "该圈弧长异常短 ($replayTotal m),请换 -Lap 或检查录像。" }
function Get-PointAtDistance([object[]]$p, [double[]]$c, [double]$dist) {
if ($dist -le 0) { return $p[0] }
$max = $c[$p.Length - 1]
if ($dist -ge $max) { return $p[$p.Length - 1] }
$lo = 0
$hi = $p.Length - 1
while ($hi - $lo -gt 1) {
$mid = [int](($lo + $hi) / 2)
if ($c[$mid] -le $dist) { $lo = $mid } else { $hi = $mid }
}
$i = $lo
$t = if (($c[$i + 1] - $c[$i]) -gt 1e-6) { ($dist - $c[$i]) / ($c[$i + 1] - $c[$i]) } else { 0.0 }
$ax = [double]$p[$i].X; $ay = [double]$p[$i].Y; $az = [double]$p[$i].Z
$bx = [double]$p[$i + 1].X; $by = [double]$p[$i + 1].Y; $bz = [double]$p[$i + 1].Z
return [pscustomobject]@{
X = [float]($ax + $t * ($bx - $ax))
Y = [float]($ay + $t * ($by - $ay))
Z = [float]($az + $t * ($bz - $az))
}
}
function Get-Pedal01AtDistance([object[]]$p, [double[]]$c, [double]$dist, [bool]$pickGas) {
if ($dist -le 0) {
$v = if ($pickGas) { [double]$p[0].G } else { [double]$p[0].Bk }
return [float]($v / 255.0)
}
$max = $c[$p.Length - 1]
if ($dist -ge $max) {
$v = if ($pickGas) { [double]$p[$p.Length - 1].G } else { [double]$p[$p.Length - 1].Bk }
return [float]($v / 255.0)
}
$lo = 0
$hi = $p.Length - 1
while ($hi - $lo -gt 1) {
$mid = [int](($lo + $hi) / 2)
if ($c[$mid] -le $dist) { $lo = $mid } else { $hi = $mid }
}
$i = $lo
$tt = if (($c[$i + 1] - $c[$i]) -gt 1e-6) { ($dist - $c[$i]) / ($c[$i + 1] - $c[$i]) } else { 0.0 }
$va = if ($pickGas) { [double]$p[$i].G } else { [double]$p[$i].Bk }
$vb = if ($pickGas) { [double]$p[$i + 1].G } else { [double]$p[$i + 1].Bk }
return [float](($va + $tt * ($vb - $va)) / 255.0)
}
$bytes = [IO.File]::ReadAllBytes($IdealLinePath)
$ver = [BitConverter]::ToInt32($bytes, 0)
if ($ver -ne 7) { throw "ideal_line 版本为 $ver,本脚本仅按版本 7 处理。" }
$n = [BitConverter]::ToInt32($bytes, 4)
if ($n -lt 10) { throw "点数异常: $n" }
$oldLens = New-Object float[] $n
for ($i = 0; $i -lt $n; $i++) {
$o = 16 + $i * 20 + 12
$oldLens[$i] = [BitConverter]::ToSingle($bytes, $o)
}
$oldMax = [double]$oldLens[$n - 1]
if ($oldMax -lt 1.0) { throw "原线累计长度异常。" }
if ($WhatIf) {
$pedalNote = if ($hasPedals) { "写入 Gas/Brake" } else { "无油门刹车数据,不改颜色" }
Write-Host "WhatIf: $IdealLinePath | $n 点 | Lap=$Lap | timing=$timingMode | 采样 $($pts.Count) | 弧长 $replayTotal m | 原线长 $oldMax m | $pedalNote"
exit 0
}
$bak = $IdealLinePath + ".bak_" + (Get-Date -Format "yyyyMMdd_HHmmss")
Copy-Item -LiteralPath $IdealLinePath -Destination $bak -Force
Write-Host "已备份: $bak"
$newLens = New-Object float[] $n
for ($i = 0; $i -lt $n; $i++) {
$frac = [double]$oldLens[$i] / $oldMax
$d = $frac * $replayTotal
$newLens[$i] = [float]$d
$q = Get-PointAtDistance $pts $cum $d
$o = 16 + $i * 20
[Array]::Copy([BitConverter]::GetBytes($q.X), 0, $bytes, $o, 4)
[Array]::Copy([BitConverter]::GetBytes($q.Y), 0, $bytes, $o + 4, 4)
[Array]::Copy([BitConverter]::GetBytes($q.Z), 0, $bytes, $o + 8, 4)
[Array]::Copy([BitConverter]::GetBytes($newLens[$i]), 0, $bytes, $o + 12, 4)
}
$PointExtraStride = 72
$nEx = [BitConverter]::ToInt32($bytes, 16 + 20 * $n)
$extraStart = 16 + 20 * $n + 4
if ($hasPedals -and ($nEx -eq $n) -and (($bytes.Length - $extraStart) -ge ($n * $PointExtraStride))) {
$ptArr = $pts.ToArray()
for ($i = 0; $i -lt $n; $i++) {
$d = [double]$newLens[$i]
$gas01 = Get-Pedal01AtDistance $ptArr $cum $d $true
$brake01 = Get-Pedal01AtDistance $ptArr $cum $d $false
$eo = $extraStart + $i * $PointExtraStride
[Array]::Copy([BitConverter]::GetBytes($gas01), 0, $bytes, $eo + 4, 4)
[Array]::Copy([BitConverter]::GetBytes($brake01), 0, $bytes, $eo + 8, 4)
}
Write-Host "已更新 PointsExtra 的 Gas/Brake。"
} elseif ($hasPedals) {
Write-Warning "PointsExtra 与点数不匹配,已跳过颜色写入。"
}
[IO.File]::WriteAllBytes($IdealLinePath, $bytes)
Write-Host "完成: $IdealLinePath"
}
finally {
if ($tempWork -and (Test-Path -LiteralPath $tempWork) -and -not $KeepTempJson) {
Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue
}
}
到这里ACReplay2AILine基本完成,但是还是存在一些问题,他只能修改ailine,并不能凭空生成,所以需要先把原本赛道的ailine拿到,才能改,然后其中未修改的值,可能有一部分是不对的或者不匹配的。
![]()
ACReplay Analysis
实现了上面的回放转行车线,我就思考是否可以把轨迹内容输出,并且和地图匹配到一起,这样就能单独看到自己在每个弯的刹车点、速度和开油点和对应的速度了,这样做分析完就可以模板化操作了。
实际想得还是太简单了,游戏内mod的数据给的太少了,赛道边界信息啥的都没给,而且现实中的T1-T14是人为定义的,实际上游戏内根本没有这个弯道定义,游戏内只是对赛道进行了3个segment的分段,要把现实和游戏的轨迹匹配上就有点困难了。
然后再说一个,游戏内是没有经纬度信息的,使用的xyz坐标系统,而现实T1-T14都不是,他们的经纬度信息缺少,这让匹配就更难了。
开始的几次尝试基本都失败了,回放轨迹和赛道匹配不上,比例大小都不正确,其实是缺少了赛道的宽度具体赛道边界曲线信息。
基于此放弃了赛道匹配,直接画轨迹,这个部分没问题,但是弯道匹配还是有误,T1-T14怎么都对不上,反复调整代码也不行,这个流程估计耗时两三个小时,最后放弃了。
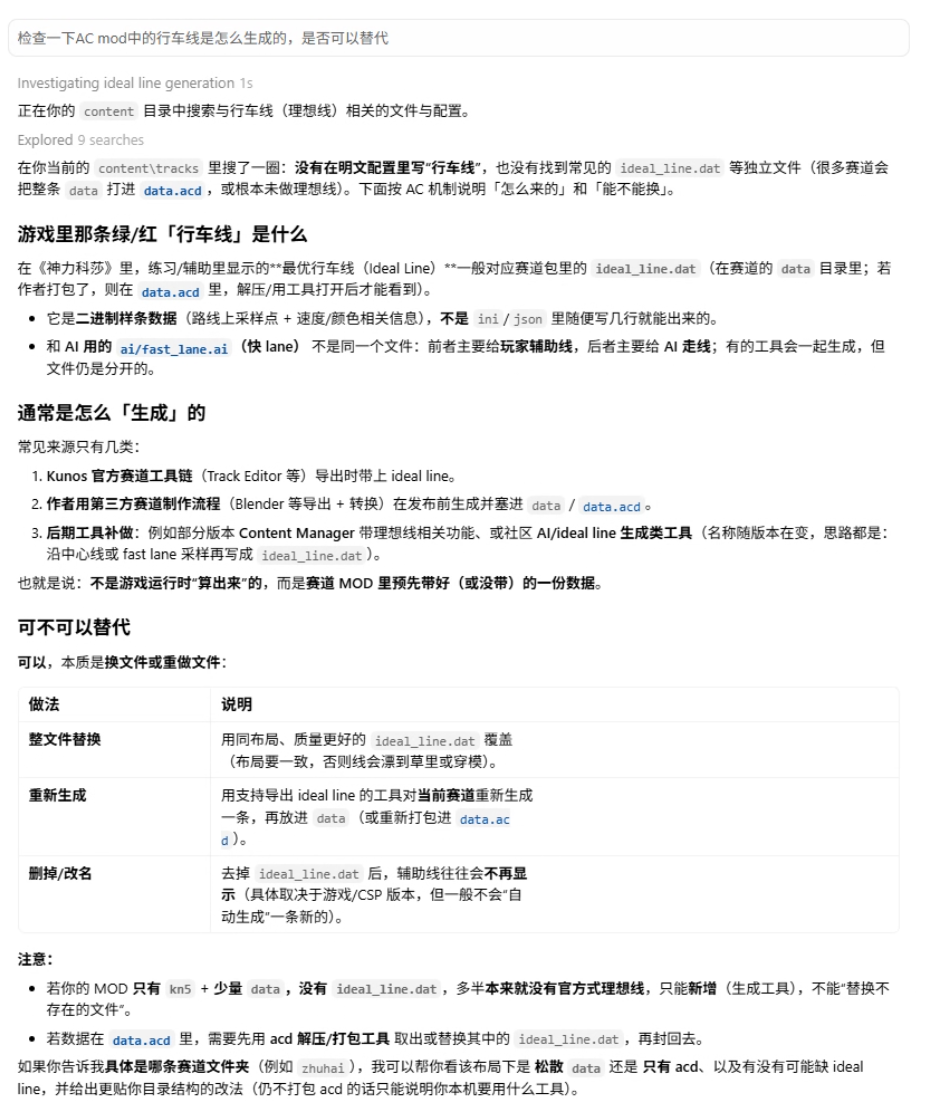
直接使用轨迹和刹车点、开油点的逻辑,把每次操作的位置和此时时速都标识出来
![]()
然后就得到了这样一张图,我称为 Action 图(操作图),可以清晰看到每个位置大概以多少速度刹车、大概在什么位置开油。
- 不过还是有点小问题,中间不给油或者保持油门的细节没有
这里比较麻烦的点是油门和刹车的判断,刹多少算刹车,持续多久算一次?同理油门,一开始沟通时没有给到这部分信息,让AI自主判断,但是结果是比较差的,出现各种奇怪情况,比如油门默认高时,不算油门上升,刹车默认高也不算刹车,上升比例要求的太多了,导致细节反馈不出来
反馈给AI以后再次生成,依然错误,甚至越改越偏。但是由于基础代码被改了,没有 commit,导致最后一错到底,无法纠正回来,只好放弃掉这部分 AI,重新梳理逻辑,再重新对话写代码。
反复调试,增加约束调节以后,总算得到了一个正确的图,并且增加用例测试,得到的结果都还行
#Requires -Version 5.1
<#
.SYNOPSIS
Generic replay lap analyzer: detect brake/throttle onsets and render trajectory markers.
If replay/corners data files are missing, they are auto-generated from the provided replay.
#>
param(
[string]$JsonPath = '',
[string]$TrackFolder = '',
[string]$CornersJson = '',
[string]$ReplayPath = '',
[string]$AcRpPath = '',
[string]$DriverName = '',
[string]$OutputPath = '',
[int]$Lap = 0,
[bool]$AutoFastestLap = $true,
[double]$MinSegmentMeters = 50.0,
[int]$ImageWidth = 1800,
[int]$ImageHeight = 1350,
[double]$InnerMarginPercent = 5.0,
[float]$FontSizeTitle = 20.0,
[float]$FontSizeMarker = 14.0,
[double]$BrakeMinSeconds = 0.3,
[double]$ThrottleMinSeconds = 0.5,
[int]$BrakePedalThreshold = 25,
[int]$GasPedalThreshold = 180,
[double]$GasReapplyMinSeconds = 0.06,
[int]$GasReapplyThreshold = 60,
[int]$GasReapplyDelta = 20,
[int]$GasReapplyBrakeMax = 20,
[bool]$AllowOverlapThrottleBetweenBrakes = $true,
[double]$SectorExpandMeters = 20.0,
[switch]$DebugEventTrace,
[string]$DebugOutputPath = '',
[switch]$HideCornerCenterLabel,
[switch]$NoVerticalFlip,
[switch]$FlipWorldZ
)
$ErrorActionPreference = 'Stop'
# PS2EXE 嵌入执行时 $PSScriptRoot / $PSCommandPath 可能为空;
# 优先使用进程主模块路径,确保在“当前目录不等于exe目录”时也能稳定定位工具目录。
$toolDir = $null
if ($PSCommandPath) {
$toolDir = Split-Path -LiteralPath $PSCommandPath
} elseif ($PSScriptRoot) {
$toolDir = $PSScriptRoot
} else {
try {
$exePath = [System.Diagnostics.Process]::GetCurrentProcess().MainModule.FileName
if ($exePath -and (Test-Path -LiteralPath $exePath)) {
$toolDir = Split-Path -LiteralPath $exePath
}
} catch { }
if (-not $toolDir) {
$a0 = [Environment]::GetCommandLineArgs()[0]
if ($a0 -and (Test-Path -LiteralPath $a0)) {
$toolDir = Split-Path -LiteralPath $a0
} else {
$toolDir = (Get-Location).Path
}
}
}
if (-not $toolDir) { throw 'Cannot resolve tool directory (expected exe or .ps1 path).' }
if (-not $TrackFolder) { $TrackFolder = Join-Path (Split-Path $toolDir -Parent) 'zhuhai' }
Add-Type -AssemblyName System.Drawing
$capPath = Join-Path $toolDir 'draw_trajectory_captions.json'
$cap = [pscustomobject]@{ sf = 'S/F'; titlePrefix = 'Replay Lap Analysis'; legend = 'Blue=track Orange=S/F Red=brake Green=throttle' }
if (Test-Path -LiteralPath $capPath) {
$cj = Get-Content -LiteralPath $capPath -Raw -Encoding UTF8 | ConvertFrom-Json
if ($cj.sf) { $cap.sf = [string]$cj.sf }
if ($cj.titlePrefix) { $cap.titlePrefix = [string]$cj.titlePrefix }
if ($cj.legend) { $cap.legend = [string]$cj.legend }
}
function Resolve-FsPath([string]$Path) {
if ([string]::IsNullOrWhiteSpace($Path)) { return $Path }
$p = $Path.Trim()
while ($p.Length -ge 2 -and $p.StartsWith('"') -and $p.EndsWith('"')) {
$p = $p.Substring(1, $p.Length - 2).Trim()
}
if ($p.StartsWith('~')) {
$rest = $p.Substring(1).TrimStart('\', '/')
$p = if ($rest) { Join-Path $HOME $rest } else { $HOME }
}
return [IO.Path]::GetFullPath($p)
}
function Get-FileStem([string]$pathOrName, [string]$fallback) {
if ([string]::IsNullOrWhiteSpace($pathOrName)) { return $fallback }
$nm = [IO.Path]::GetFileNameWithoutExtension($pathOrName)
if ([string]::IsNullOrWhiteSpace($nm)) { return $fallback }
return $nm
}
function Clamp-Int([int]$v, [int]$lo, [int]$hi) {
if ($v -lt $lo) { return $lo }
if ($v -gt $hi) { return $hi }
return $v
}
function Get-SfCrossingIndices($j) {
$cross = New-Object System.Collections.Generic.List[int]
if (-not $j.currentLapTime -or ($j.currentLapTime.Count -ne $j.x.Count)) { return $cross }
for ($i = 1; $i -lt $j.currentLapTime.Count; $i++) {
$a = [int]$j.currentLapTime[$i - 1]; $b = [int]$j.currentLapTime[$i]
$lapInc = [int]$j.currentLap[$i] - [int]$j.currentLap[$i - 1]
if (($a - $b -gt 500) -or ($lapInc -gt 0)) {
$prev = if ($cross.Count -gt 0) { $cross[$cross.Count - 1] } else { -9999 }
if (($i - $prev) -gt 2) { [void]$cross.Add($i) }
}
}
return $cross
}
function Measure-ArcJson($j, [int]$i0, [int]$i1Exclusive) {
$s = 0.0; $px = $null; $py = $null; $pz = $null
for ($i = $i0; $i -lt $i1Exclusive; $i++) {
$x = [double]$j.x[$i]; $y = [double]$j.y[$i]; $z = [double]$j.z[$i]
if ($null -ne $px) {
$dx = $x - $px; $dy = $y - $py; $dz = $z - $pz
$s += [Math]::Sqrt($dx * $dx + $dy * $dy + $dz * $dz)
}
$px = $x; $py = $y; $pz = $z
}
return $s
}
function Select-TimingSegment($j, [int]$LapVal, [double]$MinSeg) {
$cross = Get-SfCrossingIndices $j
if ($cross.Count -lt 2) { return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_crossings' } }
$bestLen = -1.0; $bestA = -1; $bestB = -1
for ($k = 0; $k -lt $cross.Count - 1; $k++) {
$a = $cross[$k]; $b = $cross[$k + 1]
if ([int]$j.currentLap[$a] -ne $LapVal) { continue }
$len = Measure-ArcJson $j $a $b
if ($len -gt $bestLen) { $bestLen = $len; $bestA = $a; $bestB = $b }
}
if ($bestA -lt 0) { return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_match' } }
if ($bestLen -lt $MinSeg) { return @{ Start = -1; End = -1; Length = $bestLen; Mode = 'segment_too_short' } }
return @{ Start = $bestA; End = $bestB; Length = $bestLen; Mode = 'ok' }
}
function Select-FastestTimingSegment($j, [double]$MinSeg) {
$cross = Get-SfCrossingIndices $j
if ($cross.Count -lt 2) { return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_crossings'; Lap = -1; TimeMs = -1 } }
$best = $null
for ($k = 0; $k -lt $cross.Count - 1; $k++) {
$a = $cross[$k]; $b = $cross[$k + 1]
$lapVal = [int]$j.currentLap[$a]
$len = Measure-ArcJson $j $a $b
if ($len -lt $MinSeg) { continue }
$timeMs = -1
if ($j.PSObject.Properties.Name -contains 'currentLapTime') {
$ti = [int]$j.currentLapTime[[Math]::Max($a, $b - 1)]
if ($ti -gt 0) { $timeMs = $ti }
}
if ($timeMs -le 0) {
$dt = Get-FrameDtSeconds $j
$timeMs = [int][Math]::Round(($b - $a) * $dt * 1000.0)
}
$cand = @{
Start = $a
End = $b
Length = $len
Mode = 'ok'
Lap = $lapVal
TimeMs = $timeMs
}
if ($null -eq $best -or $cand.TimeMs -lt $best.TimeMs) {
$best = $cand
}
}
if ($null -eq $best) { return @{ Start = -1; End = -1; Length = 0.0; Mode = 'no_valid_segment'; Lap = -1; TimeMs = -1 } }
return $best
}
function Get-SpeedKmh($j, [int]$fi) {
$vx = [double]$j.velocityX[$fi]; $vy = [double]$j.velocityY[$fi]; $vz = [double]$j.velocityZ[$fi]
return [Math]::Sqrt($vx * $vx + $vy * $vy + $vz * $vz) * 3.6
}
function Get-FrameDtSeconds($j) {
if ($j.PSObject.Properties.Name -contains 'recordingInterval') {
$ri = [double]$j.recordingInterval
if ($ri -gt 0 -and $ri -le 100.0) { return $ri / 1000.0 }
if ($ri -gt 100.0) { return 1.0 / $ri }
}
return (1.0 / 60.0)
}
function Get-BoundariesFromSegmentEnds([double[]]$ends) {
if ($ends.Count -ne 14) { throw 'segmentEndFraction must have 14 elements, last=1.0' }
if ([Math]::Abs($ends[13] - 1.0) -gt 0.001) { throw 'segmentEndFraction[13] must be 1.0' }
$b = New-Object double[] 15
$b[0] = 0.0
for ($i = 0; $i -lt 14; $i++) { $b[$i + 1] = $ends[$i] }
return $b
}
function Find-KRangeForArc([double[]]$sArr, [double]$lapLen, [double]$f0, [double]$f1, [int]$m) {
$s0 = [Math]::Max(0.0, $f0 * $lapLen)
$s1 = [Math]::Min($lapLen, $f1 * $lapLen)
$k0 = 0
for ($k = 0; $k -lt $m; $k++) {
if ($sArr[$k] -ge $s0) { $k0 = $k; break }
}
$k1 = $m - 1
for ($k = $m - 1; $k -ge 0; $k--) {
if ($sArr[$k] -le $s1) { $k1 = $k; break }
}
if ($k1 -lt $k0) { $k1 = $k0 }
return $k0, $k1
}
function Find-KClosestToS([double[]]$sArr, [double]$targetS, [int]$k0, [int]$k1) {
$best = $k0
$bd = [Math]::Abs($sArr[$k0] - $targetS)
for ($k = $k0; $k -le $k1; $k++) {
$d = [Math]::Abs($sArr[$k] - $targetS)
if ($d -lt $bd) { $bd = $d; $best = $k }
}
return $best
}
function Find-FirstSustainedAbove([int[]]$vals, [int]$k0, [int]$k1, [int]$thr, [int]$minFrames) {
if ($minFrames -lt 1) { $minFrames = 1 }
for ($start = $k0; $start -le $k1; $start++) {
if ($vals[$start] -lt $thr) { continue }
$ok = $true
for ($i = 0; $i -lt $minFrames; $i++) {
$kk = $start + $i
if ($kk -gt $k1) { $ok = $false; break }
if ($vals[$kk] -lt $thr) { $ok = $false; break }
}
if ($ok) { return $start }
}
return -1
}
function Find-FirstRisingSustainedAbove([int[]]$vals, [int]$k0, [int]$k1, [int]$thr, [int]$minFrames) {
if ($minFrames -lt 1) { $minFrames = 1 }
$st0 = [Math]::Max(1, $k0)
for ($start = $st0; $start -le $k1; $start++) {
# Rising edge: previous frame below threshold, current frame reaches threshold.
if ($vals[$start - 1] -ge $thr) { continue }
if ($vals[$start] -lt $thr) { continue }
$ok = $true
for ($i = 0; $i -lt $minFrames; $i++) {
$kk = $start + $i
if ($kk -gt $k1) { $ok = $false; break }
if ($vals[$kk] -lt $thr) { $ok = $false; break }
}
if ($ok) { return $start }
}
return -1
}
function Find-FirstGasReapply([int[]]$gasVals, [int[]]$brkVals, [int]$k0, [int]$k1, [int]$minGas, [int]$minDelta, [int]$brakeMax, [int]$minFrames) {
if ($minFrames -lt 1) { $minFrames = 1 }
$st0 = [Math]::Max(1, $k0)
for ($start = $st0; $start -le $k1; $start++) {
if ($brkVals[$start] -gt $brakeMax) { continue }
if ($gasVals[$start] -lt $minGas) { continue }
if (($gasVals[$start] - $gasVals[$start - 1]) -lt $minDelta) { continue }
$ok = $true
for ($i = 0; $i -lt $minFrames; $i++) {
$kk = $start + $i
if ($kk -gt $k1) { $ok = $false; break }
if ($gasVals[$kk] -lt $minGas) { $ok = $false; break }
if ($brkVals[$kk] -gt $brakeMax) { $ok = $false; break }
}
if ($ok) { return $start }
}
return -1
}
function Find-FirstGasReapplyOverlap([int[]]$gasVals, [int]$k0, [int]$k1, [int]$minGas, [int]$minDelta, [int]$minFrames) {
if ($minFrames -lt 1) { $minFrames = 1 }
$st0 = [Math]::Max(1, $k0)
for ($start = $st0; $start -le $k1; $start++) {
if ($gasVals[$start] -lt $minGas) { continue }
if (($gasVals[$start] - $gasVals[$start - 1]) -lt $minDelta) { continue }
$ok = $true
for ($i = 0; $i -lt $minFrames; $i++) {
$kk = $start + $i
if ($kk -gt $k1) { $ok = $false; break }
if ($gasVals[$kk] -lt $minGas) { $ok = $false; break }
}
if ($ok) { return $start }
}
return -1
}
function Get-ContiguousRunEnd([int[]]$vals, [int]$start, [int]$k1, [int]$thr) {
$e = $start
for ($k = $start; $k -le $k1; $k++) {
if ($vals[$k] -ge $thr) { $e = $k } else { break }
}
return $e
}
function Get-LongestRunAbove([int[]]$vals, [int]$k0, [int]$k1, [int]$thr) {
if ($k1 -lt $k0) { return 0 }
$best = 0
$cur = 0
for ($k = $k0; $k -le $k1; $k++) {
if ($vals[$k] -ge $thr) {
$cur++
if ($cur -gt $best) { $best = $cur }
} else {
$cur = 0
}
}
return $best
}
function New-CjkDrawingFont([float]$emSize, [System.Drawing.FontStyle]$style) {
$unit = [System.Drawing.GraphicsUnit]::Point
foreach ($n in @('Microsoft YaHei UI', 'Microsoft YaHei', 'SimHei', 'Segoe UI')) {
try {
$fam = New-Object System.Drawing.FontFamily $n
if ($fam.IsStyleAvailable($style)) { return [System.Drawing.Font]::new($fam, $emSize, $style, $unit) }
} catch { }
}
return [System.Drawing.Font]::new('Segoe UI', $emSize, $style, $unit)
}
function Ensure-ReplayJson([string]$TargetJsonPath, [string]$ReplayPathIn, [string]$AcRpPathIn, [string]$DriverNameIn) {
if (Test-Path -LiteralPath $TargetJsonPath) { return }
$acrp = if ([string]::IsNullOrWhiteSpace($AcRpPathIn)) { Join-Path $toolDir 'acrp.exe' } else { Resolve-FsPath $AcRpPathIn }
if (-not (Test-Path -LiteralPath $acrp)) {
throw "Replay JSON missing and acrp.exe not found: $acrp"
}
$replay = $ReplayPathIn
if ([string]::IsNullOrWhiteSpace($replay)) {
$rp = @(Get-ChildItem -LiteralPath $toolDir -Filter *.acreplay -File | Sort-Object LastWriteTime -Descending)
if ($rp.Count -lt 1) { throw "Replay JSON missing and no .acreplay found in $toolDir" }
$replay = $rp[0].FullName
} else {
$replay = Resolve-FsPath $replay
}
if (-not (Test-Path -LiteralPath $replay)) { throw "Replay file not found: $replay" }
$outDir = Split-Path -Parent $TargetJsonPath
if ($outDir -and -not (Test-Path -LiteralPath $outDir)) {
New-Item -ItemType Directory -Path $outDir -Force | Out-Null
}
$tempWork = Join-Path ([IO.Path]::GetTempPath()) ('ac_lap_' + [guid]::NewGuid().ToString('N'))
New-Item -ItemType Directory -Path $tempWork -Force | Out-Null
$outPrefix = Join-Path $tempWork 'acrp_out'
try {
$argList = New-Object System.Collections.Generic.List[string]
[void]$argList.Add('-o')
[void]$argList.Add($outPrefix)
if (-not [string]::IsNullOrWhiteSpace($DriverNameIn)) {
[void]$argList.Add('--driver-name')
[void]$argList.Add($DriverNameIn)
}
[void]$argList.Add($replay)
Write-Host "Generating replay JSON via acrp: $replay"
$proc = Start-Process -FilePath $acrp -ArgumentList $argList.ToArray() -Wait -PassThru -NoNewWindow
if ($proc.ExitCode -ne 0) { throw "acrp.exe exit code $($proc.ExitCode)" }
$jsonFiles = @(Get-ChildItem -LiteralPath $tempWork -Filter *.json -File | Sort-Object LastWriteTime -Descending)
if ($jsonFiles.Count -lt 1) { throw "acrp generated no JSON in: $tempWork" }
if ($jsonFiles.Count -gt 1 -and [string]::IsNullOrWhiteSpace($DriverNameIn)) {
throw "acrp generated multiple JSON files; pass -DriverName to pick one."
}
Copy-Item -LiteralPath $jsonFiles[0].FullName -Destination $TargetJsonPath -Force
Write-Host "Generated: $TargetJsonPath"
} finally {
Remove-Item -LiteralPath $tempWork -Recurse -Force -ErrorAction SilentlyContinue
}
}
function Build-CornerJsonFromReplay($j, [string]$TargetPath, [int]$LapVal, [double]$MinSegMeters, [double]$DedupMinGapMeters, [bool]$AutoFastestLapVal) {
$seg = if ($AutoFastestLapVal) { Select-FastestTimingSegment $j $MinSegMeters } else { Select-TimingSegment $j $LapVal $MinSegMeters }
if ($seg.Mode -ne 'ok' -or $seg.Start -lt 0) { throw "Cannot build corners: timing segment $($seg.Mode)" }
$iStart = $seg.Start; $iEnd = $seg.End
$idx = New-Object System.Collections.Generic.List[int]
for ($i = $iStart; $i -lt $iEnd; $i++) { [void]$idx.Add($i) }
if ($idx.Count -lt 200) { throw "Cannot build corners: too few frames ($($idx.Count))" }
$m = $idx.Count
$s = New-Object double[] $m
$brk = New-Object int[] $m
for ($k = 0; $k -lt $m; $k++) {
$fi = $idx[$k]
if ($k -gt 0) {
$pi = $idx[$k - 1]
$dx = [double]$j.x[$fi] - [double]$j.x[$pi]
$dy = [double]$j.y[$fi] - [double]$j.y[$pi]
$dz = [double]$j.z[$fi] - [double]$j.z[$pi]
$s[$k] = $s[$k - 1] + [Math]::Sqrt($dx * $dx + $dy * $dy + $dz * $dz)
}
$brk[$k] = [int]$j.brake[$fi]
}
$lapLen = $s[$m - 1]
if ($lapLen -lt 100.0) { throw "Cannot build corners: lap length abnormal ($lapLen)" }
$cand = New-Object System.Collections.Generic.List[object]
for ($k = 1; $k -lt $m; $k++) {
$prev = $brk[$k - 1]; $cur = $brk[$k]
$isOnset = ($cur -ge 35 -and $prev -lt 25) -or ($cur -ge 22 -and $prev -lt 12) -or (($cur - $prev) -ge 20 -and $cur -ge 18)
if ($isOnset) {
[void]$cand.Add([pscustomobject]@{
K = $k
S = $s[$k]
Fraction = ($s[$k] / $lapLen)
Score = ($cur + [Math]::Max(0, $cur - $prev))
})
}
}
if ($cand.Count -lt 14) { throw "Cannot build corners: brake onset candidates <14 ($($cand.Count))" }
$selected = New-Object System.Collections.Generic.List[object]
foreach ($c in ($cand | Sort-Object Score -Descending)) {
if ($selected.Count -ge 14) { break }
$ok = $true
foreach ($slt in $selected) {
$d = [Math]::Abs($c.S - $slt.S)
$dc = [Math]::Min($d, $lapLen - $d)
if ($dc -lt $DedupMinGapMeters) { $ok = $false; break }
}
if ($ok) { [void]$selected.Add($c) }
}
if ($selected.Count -lt 14) {
foreach ($c in ($cand | Sort-Object Score -Descending)) {
if ($selected.Count -ge 14) { break }
$exists = $false
foreach ($slt in $selected) { if ([int]$slt.K -eq [int]$c.K) { $exists = $true; break } }
if (-not $exists) { [void]$selected.Add($c) }
}
}
if ($selected.Count -lt 14) { throw "Cannot build corners: selected <14 ($($selected.Count))" }
$bf = @($selected | Sort-Object Fraction | Select-Object -First 14 | ForEach-Object { [double]$_.Fraction })
$ends = @()
for ($i = 0; $i -lt 13; $i++) { $ends += [Math]::Round((($bf[$i] + $bf[$i + 1]) / 2.0), 6) }
$ends += 1.0
$b = @(0.0) + $ends
$center = @()
for ($i = 0; $i -lt 14; $i++) { $center += [Math]::Round((($b[$i] + $b[$i + 1]) / 2.0), 6) }
$obj = [ordered]@{
_comment = "Auto-generated by DrawZhuhaiLapCorners.ps1 from replay brake onsets."
_comment2 = "segmentEndFraction[13] fixed at 1.0; cornerCenterFraction is sector midpoint."
segmentEndFraction = $ends
cornerCenterFraction = $center
}
$outDir = Split-Path -Parent $TargetPath
if ($outDir -and -not (Test-Path -LiteralPath $outDir)) {
New-Item -ItemType Directory -Path $outDir -Force | Out-Null
}
($obj | ConvertTo-Json -Depth 6) | Set-Content -LiteralPath $TargetPath -Encoding UTF8
Write-Host "Generated: $TargetPath"
}
$ReplayPath = Resolve-FsPath $ReplayPath
$legacyJson = Join-Path $toolDir 'zhuhai_replay_out_elmagnifico.json'
$legacyCorners = Join-Path $toolDir 'zhuhai_t1_t14_apex_fractions.json'
if ([string]::IsNullOrWhiteSpace($JsonPath)) {
if (-not [string]::IsNullOrWhiteSpace($ReplayPath)) {
$rpDir = Split-Path -Parent $ReplayPath
$rpStem = Get-FileStem $ReplayPath 'replay'
$JsonPath = Join-Path $rpDir ($rpStem + '_replay.json')
} elseif (Test-Path -LiteralPath $legacyJson) {
$JsonPath = $legacyJson
} else {
throw "Please provide -ReplayPath or -JsonPath."
}
}
if ([string]::IsNullOrWhiteSpace($CornersJson)) {
if (-not [string]::IsNullOrWhiteSpace($ReplayPath)) {
$rpDir = Split-Path -Parent $ReplayPath
$rpStem = Get-FileStem $ReplayPath 'replay'
$CornersJson = Join-Path $rpDir ($rpStem + '_corners.json')
} elseif (Test-Path -LiteralPath $legacyCorners) {
$CornersJson = $legacyCorners
} else {
$jDir = Split-Path -Parent $JsonPath
$jStem = Get-FileStem $JsonPath 'replay'
$CornersJson = Join-Path $jDir ($jStem + '_corners.json')
}
}
if ([string]::IsNullOrWhiteSpace($OutputPath)) {
if (-not [string]::IsNullOrWhiteSpace($ReplayPath)) {
$rpDir = Split-Path -Parent $ReplayPath
$rpStem = Get-FileStem $ReplayPath 'replay'
$OutputPath = Join-Path $rpDir ($rpStem + '_brake_throttle_points.png')
} else {
$jDir = Split-Path -Parent $JsonPath
$jStem = Get-FileStem $JsonPath 'replay'
$OutputPath = Join-Path $jDir ($jStem + '_brake_throttle_points.png')
}
}
if ([string]::IsNullOrWhiteSpace($DebugOutputPath)) {
$DebugOutputPath = [IO.Path]::ChangeExtension($OutputPath, '.debug.csv')
}
$JsonPath = Resolve-FsPath $JsonPath
$CornersJson = Resolve-FsPath $CornersJson
$OutputPath = Resolve-FsPath $OutputPath
$DebugOutputPath = Resolve-FsPath $DebugOutputPath
Ensure-ReplayJson $JsonPath $ReplayPath $AcRpPath $DriverName
$j = Get-Content -LiteralPath $JsonPath -Raw -Encoding UTF8 | ConvertFrom-Json
if (-not (Test-Path -LiteralPath $CornersJson)) {
Build-CornerJsonFromReplay $j $CornersJson $Lap $MinSegmentMeters 28.0 $AutoFastestLap
}
$apexObj = Get-Content -LiteralPath $CornersJson -Raw -Encoding UTF8 | ConvertFrom-Json
if (-not $apexObj.segmentEndFraction) { throw 'CornersJson needs segmentEndFraction[14] ending with 1.0' }
$se = @([double[]]@($apexObj.segmentEndFraction))
$boundaries = Get-BoundariesFromSegmentEnds $se
$cornerCenter = $null
if ($apexObj.cornerCenterFraction) {
$cornerCenter = @([double[]]@($apexObj.cornerCenterFraction))
if ($cornerCenter.Count -ne 14) { throw 'cornerCenterFraction must have 14 elements if set' }
}
$nF = $j.x.Count
if ($j.velocityX.Count -ne $nF) { throw 'JSON needs velocityX/Y/Z same length as x.' }
$dt = Get-FrameDtSeconds $j
$brkFrames = [int][math]::Ceiling($BrakeMinSeconds / $dt)
$gasFrames = [int][math]::Ceiling($ThrottleMinSeconds / $dt)
$gasReapplyFrames = [int][math]::Ceiling($GasReapplyMinSeconds / $dt)
Write-Host "Frame dt=${dt}s brake>=${BrakeMinSeconds}s -> ${brkFrames} frames throttle>=${ThrottleMinSeconds}s -> ${gasFrames} frames"
$seg = if ($AutoFastestLap) { Select-FastestTimingSegment $j $MinSegmentMeters } else { Select-TimingSegment $j $Lap $MinSegmentMeters }
$iStart = 0; $iEnd = $nF; $timingUsed = $false
if ($seg.Mode -eq 'ok' -and $seg.Start -ge 0) {
$iStart = $seg.Start; $iEnd = $seg.End; $timingUsed = $true
if ($AutoFastestLap) {
$Lap = [int]$seg.Lap
Write-Host "Timing (fastest lap): lap=$Lap time_ms=$($seg.TimeMs) frames $($seg.Start)..$($seg.End) length_m=$([math]::Round($seg.Length,1))"
} else {
Write-Host "Timing: frames $($seg.Start)..$($seg.End) length_m=$([math]::Round($seg.Length,1))"
}
} else {
Write-Warning "Timing: $($seg.Mode)"
}
$idx = New-Object System.Collections.Generic.List[int]
for ($i = $iStart; $i -lt $iEnd; $i++) {
if (-not $timingUsed) {
if ([int]$j.currentLap[$i] -ne $Lap) { continue }
}
[void]$idx.Add($i)
}
if ($idx.Count -lt 200) { throw "Too few frames: $($idx.Count)" }
$m = $idx.Count
$s = New-Object double[] $m
$sp = New-Object double[] $m
$brk = New-Object int[] $m
$gas = New-Object int[] $m
$xs = New-Object double[] $m
$zs = New-Object double[] $m
for ($k = 0; $k -lt $m; $k++) {
$fi = $idx[$k]
$xs[$k] = [double]$j.x[$fi]; $zs[$k] = [double]$j.z[$fi]
if ($k -gt 0) {
$pi = $idx[$k - 1]
$dx = [double]$j.x[$fi] - [double]$j.x[$pi]
$dy = [double]$j.y[$fi] - [double]$j.y[$pi]
$dz = [double]$j.z[$fi] - [double]$j.z[$pi]
$s[$k] = $s[$k - 1] + [Math]::Sqrt($dx * $dx + $dy * $dy + $dz * $dz)
}
$sp[$k] = Get-SpeedKmh $j $fi
$brk[$k] = [int]$j.brake[$fi]
$gas[$k] = [int]$j.gas[$fi]
}
$lapLen = $s[$m - 1]
if ($lapLen -lt 100.0) { throw "Lap length abnormal: $lapLen" }
$xmin = ($xs | Measure-Object -Minimum).Minimum
$xmax = ($xs | Measure-Object -Maximum).Maximum
$zmin = ($zs | Measure-Object -Minimum).Minimum
$zmax = ($zs | Measure-Object -Maximum).Maximum
$innerFrac = [Math]::Max(0.0, [Math]::Min(0.45, $InnerMarginPercent / 100.0))
$bmpW = $ImageWidth; $bmpH = $ImageHeight
$iw = $bmpW * (1.0 - 2.0 * $innerFrac); $ih = $bmpH * (1.0 - 2.0 * $innerFrac)
$rw = [Math]::Max(1e-9, $xmax - $xmin); $rz = [Math]::Max(1e-9, $zmax - $zmin)
$sc = [Math]::Min($iw / $rw, $ih / $rz)
$offX = $bmpW * $innerFrac + ($iw - $sc * $rw) / 2.0
$offZ = $bmpH * $innerFrac + ($ih - $sc * $rz) / 2.0
$pxi = New-Object int[] $m
$pzi = New-Object int[] $m
for ($k = 0; $k -lt $m; $k++) {
$pxd = $offX + ($xs[$k] - $xmin) * $sc
if ($FlipWorldZ.IsPresent) { $pzd = $offZ + ($zs[$k] - $zmin) * $sc }
else { $pzd = $offZ + ($zmax - $zs[$k]) * $sc }
$pxi[$k] = Clamp-Int ([int][Math]::Round($pxd)) 0 ($bmpW - 1)
$pzi[$k] = Clamp-Int ([int][Math]::Round($pzd)) 0 ($bmpH - 1)
}
if (-not $NoVerticalFlip.IsPresent) {
for ($k = 0; $k -lt $m; $k++) { $pzi[$k] = $bmpH - 1 - $pzi[$k] }
}
$bmp = New-Object System.Drawing.Bitmap $bmpW, $bmpH
$g = [System.Drawing.Graphics]::FromImage($bmp)
$g.SmoothingMode = [System.Drawing.Drawing2D.SmoothingMode]::AntiAlias
$g.TextRenderingHint = [System.Drawing.Text.TextRenderingHint]::AntiAlias
$g.Clear([System.Drawing.Color]::White)
$fontTitle = New-CjkDrawingFont $FontSizeTitle ([System.Drawing.FontStyle]::Bold)
$fontMk = New-CjkDrawingFont $FontSizeMarker ([System.Drawing.FontStyle]::Bold)
$brushTxt = New-Object System.Drawing.SolidBrush ([System.Drawing.Color]::FromArgb(240, 30, 30, 30))
$penTrace = New-Object System.Drawing.Pen ([System.Drawing.Color]::FromArgb(200, 40, 90, 200)), 3
$brushRed = New-Object System.Drawing.SolidBrush ([System.Drawing.Color]::FromArgb(230, 200, 40, 40))
$brushGreen = New-Object System.Drawing.SolidBrush ([System.Drawing.Color]::FromArgb(230, 30, 150, 50))
$brushSf = New-Object System.Drawing.SolidBrush ([System.Drawing.Color]::FromArgb(255, 200, 130, 0))
$penLeader = New-Object System.Drawing.Pen ([System.Drawing.Color]::FromArgb(160, 90, 90, 90)), 1.0
for ($k = 1; $k -lt $m; $k++) {
$g.DrawLine($penTrace, $pxi[$k - 1], $pzi[$k - 1], $pxi[$k], $pzi[$k])
}
$occupied = New-Object 'System.Collections.Generic.List[System.Drawing.RectangleF]'
function Test-RectOverlap([System.Drawing.RectangleF]$a, [System.Drawing.RectangleF]$b, [float]$pad) {
$ax1 = $a.Left - $pad; $ay1 = $a.Top - $pad; $ax2 = $a.Right + $pad; $ay2 = $a.Bottom + $pad
$bx1 = $b.Left - $pad; $by1 = $b.Top - $pad; $bx2 = $b.Right + $pad; $by2 = $b.Bottom + $pad
return -not (($ax2 -lt $bx1) -or ($ax1 -gt $bx2) -or ($ay2 -lt $by1) -or ($ay1 -gt $by2))
}
function New-LabelPlacement {
param($Graphics, $Font, [string]$Text, [int]$cx, [int]$cy, [int]$imgW, [int]$imgH, $Occupied, [float[]]$OffsetCandidates)
$sz = $Graphics.MeasureString($Text, $Font)
$w = $sz.Width + 6; $h = $sz.Height + 4
$pad = [float]4
for ($ci = 0; $ci -lt $OffsetCandidates.Length; $ci += 2) {
$tx = [float]($cx + $OffsetCandidates[$ci]); $ty = [float]($cy + $OffsetCandidates[$ci + 1])
if ($tx + $w -gt $imgW - 4) { $tx = [float]($imgW - 4 - $w) }
if ($tx -lt 4) { $tx = 4 }
if ($ty + $h -gt $imgH - 4) { $ty = [float]($imgH - 4 - $h) }
if ($ty -lt 4) { $ty = 4 }
$rc = [System.Drawing.RectangleF]::new($tx, $ty, $w, $h)
$hit = $false
foreach ($o in $Occupied) { if (Test-RectOverlap $rc $o $pad) { $hit = $true; break } }
if (-not $hit) {
[void]$Occupied.Add($rc)
return @{ Tx = $tx; Ty = $ty; W = $w; H = $h }
}
}
# Fallback: radial search around anchor to minimize collisions in dense areas.
for ($rad = 26.0; $rad -le 190.0; $rad += 12.0) {
for ($ang = 0.0; $ang -lt 360.0; $ang += 20.0) {
$rx = [Math]::Cos($ang * [Math]::PI / 180.0) * $rad
$ry = [Math]::Sin($ang * [Math]::PI / 180.0) * $rad
$tx = [float]($cx + $rx)
$ty = [float]($cy + $ry)
if ($tx + $w -gt $imgW - 4) { $tx = [float]($imgW - 4 - $w) }
if ($tx -lt 4) { $tx = 4 }
if ($ty + $h -gt $imgH - 4) { $ty = [float]($imgH - 4 - $h) }
if ($ty -lt 4) { $ty = 4 }
$rc = [System.Drawing.RectangleF]::new($tx, $ty, $w, $h)
$hit = $false
foreach ($o in $Occupied) { if (Test-RectOverlap $rc $o $pad) { $hit = $true; break } }
if (-not $hit) {
[void]$Occupied.Add($rc)
return @{ Tx = $tx; Ty = $ty; W = $w; H = $h }
}
}
}
# Last resort: place at corner to guarantee visibility.
$tx0 = [float]4; $ty0 = [float]4
$rc0 = [System.Drawing.RectangleF]::new($tx0, $ty0, $w, $h)
[void]$Occupied.Add($rc0)
return @{ Tx = $tx0; Ty = $ty0; W = $w; H = $h }
}
function Draw-StringWithLeader {
param($Graphics, $Font, $Brush, $PenL, [int]$cx, [int]$cy, [string]$Text, $Place)
$Graphics.DrawString($Text, $Font, $Brush, $Place.Tx, $Place.Ty)
$mx = $Place.Tx + $Place.W / 2.0; $my = $Place.Ty + $Place.H / 2.0
$Graphics.DrawLine($PenL, [float]$cx, [float]$cy, $mx, $my)
}
$sfOff = [float[]]@(20.0, -28.0, -120.0, -28.0, 20.0, 22.0)
$sfPl = New-LabelPlacement $g $fontMk $cap.sf $pxi[0] $pzi[0] $bmpW $bmpH $occupied $sfOff
$g.FillEllipse($brushSf, $pxi[0] - 10, $pzi[0] - 10, 20, 20)
Draw-StringWithLeader $g $fontMk $brushTxt $penLeader $pxi[0] $pzi[0] $cap.sf $sfPl
$bOff = [float[]]@(16.0, -28.0, -120.0, -28.0, 20.0, 22.0, -130.0, 24.0, 95.0, -34.0, 110.0, 12.0)
$gOff = [float[]]@(-16.0, 26.0, 90.0, 26.0, -26.0, -18.0, 110.0, -24.0, -120.0, 30.0, 24.0, 44.0)
$prevBrakeRunEnd = -1
$prevGasRunEnd = -1
$events = New-Object System.Collections.Generic.List[object]
$debugRows = New-Object System.Collections.Generic.List[object]
for ($ti = 0; $ti -lt 14; $ti++) {
$f0 = $boundaries[$ti]; $f1 = $boundaries[$ti + 1]
$sLo = [Math]::Max(0.0, ($f0 * $lapLen) - $SectorExpandMeters)
$sHi = [Math]::Min($lapLen, ($f1 * $lapLen) + $SectorExpandMeters)
$ff0 = $sLo / $lapLen
$ff1 = $sHi / $lapLen
$k0, $k1 = Find-KRangeForArc $s $lapLen $ff0 $ff1 $m
# Avoid repeated brake markers when one long brake run spans adjacent sectors.
$searchK0 = [Math]::Max($k0, $prevBrakeRunEnd + 1)
$bk = Find-FirstRisingSustainedAbove $brk $searchK0 $k1 $BrakePedalThreshold $brkFrames
$brkEnd = -1
if ($bk -ge 0) {
$brkEnd = Get-ContiguousRunEnd $brk $bk $k1 $BrakePedalThreshold
if ($brkEnd -gt $prevBrakeRunEnd) { $prevBrakeRunEnd = $brkEnd }
}
$gasFrom = $k0
if ($brkEnd -ge 0) { $gasFrom = [Math]::Min($k1, $brkEnd + 1) }
$gasSearchK0 = [Math]::Max($gasFrom, $prevGasRunEnd + 1)
$tkRise = Find-FirstRisingSustainedAbove $gas $gasSearchK0 $k1 $GasPedalThreshold $gasFrames
$tkSustain = -1
$tkReapply = -1
$tk = $tkRise
$tkSource = 'rise'
if ($tk -lt 0) {
# Fallback: if no clean rising edge exists in this window, still capture first sustained high-gas point.
$tkSustain = Find-FirstSustainedAbove $gas $gasSearchK0 $k1 $GasPedalThreshold $gasFrames
$tk = $tkSustain
$tkSource = 'sustain'
}
if ($tk -lt 0) {
# Fallback 2: capture lower-threshold throttle reapply when speed rises but full gas threshold isn't reached.
$tkReapply = Find-FirstGasReapply $gas $brk $gasSearchK0 $k1 $GasReapplyThreshold $GasReapplyDelta $GasReapplyBrakeMax $gasReapplyFrames
$tk = $tkReapply
$tkSource = 'reapply'
}
if ($tk -lt 0) { $tkSource = 'none' }
if ($tk -ge 0) {
$gasEnd = Get-ContiguousRunEnd $gas $tk $k1 $GasPedalThreshold
if ($gasEnd -gt $prevGasRunEnd) { $prevGasRunEnd = $gasEnd }
}
if ($bk -ge 0) {
[void]$events.Add([pscustomobject]@{
K = $bk
Kind = 'brake'
Sector = ($ti + 1)
Source = 'rise'
GasValue = 0
Speed = [int][math]::Round($sp[$bk], 0)
Px = $pxi[$bk]
Py = $pzi[$bk]
})
}
if ($tk -ge 0) {
[void]$events.Add([pscustomobject]@{
K = $tk
Kind = 'gas'
Sector = ($ti + 1)
Source = $tkSource
GasValue = [int]$gas[$tk]
Speed = [int][math]::Round($sp[$tk], 0)
Px = $pxi[$tk]
Py = $pzi[$tk]
})
}
if ($DebugEventTrace.IsPresent) {
$secMaxGas = ($gas[$k0..$k1] | Measure-Object -Maximum).Maximum
$secMaxBrk = ($brk[$k0..$k1] | Measure-Object -Maximum).Maximum
[void]$debugRows.Add([pscustomobject]@{
Phase = 'sector'
Sector = ('T{0}' -f ($ti + 1))
k0 = $k0
k1 = $k1
searchBrakeK0 = $searchK0
bk = $bk
brkEnd = $brkEnd
gasSearchK0 = $gasSearchK0
tkRise = $tkRise
tkSustain = $tkSustain
tkReapply = $tkReapply
tkPicked = $tk
tkSource = $tkSource
secMaxGas = $secMaxGas
secMaxBrk = $secMaxBrk
})
}
}
$markerId = 0
$orderedEvents = @($events | Sort-Object K, Kind)
# Global补漏:若两次刹车之间无油门点,则在中间区间再做一次补油搜索。
$brakeEvents = @($orderedEvents | Where-Object { $_.Kind -eq 'brake' } | Sort-Object K)
if ($brakeEvents.Count -ge 2) {
for ($bi = 0; $bi -lt $brakeEvents.Count - 1; $bi++) {
$kA = [int]$brakeEvents[$bi].K
$kB = [int]$brakeEvents[$bi + 1].K
if (($kB - $kA) -lt 3) { continue }
$hasGasBetween = $false
foreach ($ev2 in $orderedEvents) {
if ($ev2.Kind -eq 'gas' -and $ev2.K -gt $kA -and $ev2.K -lt $kB) {
$hasGasBetween = $true
break
}
}
if ($hasGasBetween) { continue }
$g0 = $kA + 1
$g1 = $kB - 1
$tkMid = Find-FirstRisingSustainedAbove $gas $g0 $g1 $GasPedalThreshold $gasFrames
if ($tkMid -lt 0) {
$tkMid = Find-FirstSustainedAbove $gas $g0 $g1 $GasPedalThreshold $gasFrames
}
if ($tkMid -lt 0) {
$tkMid = Find-FirstGasReapply $gas $brk $g0 $g1 $GasReapplyThreshold $GasReapplyDelta $GasReapplyBrakeMax $gasReapplyFrames
}
if ($tkMid -lt 0 -and $AllowOverlapThrottleBetweenBrakes) {
# Only in brake-to-brake gaps: allow overlap throttle reapply without brake-max constraint.
$tkMid = Find-FirstGasReapplyOverlap $gas $g0 $g1 $GasReapplyThreshold $GasReapplyDelta $gasReapplyFrames
if ($tkMid -lt 0) {
# If gas is already high in this gap (no rise edge), capture the first sustained high-gas sample.
$tkMid = Find-FirstSustainedAbove $gas $g0 $g1 $GasReapplyThreshold $gasReapplyFrames
}
if ($tkMid -lt 0) {
# Final fallback for brake-to-brake gap: pick max-gas point in gap to avoid missing obvious refill.
$bestK = -1
$bestG = -1
for ($kk = $g0; $kk -le $g1; $kk++) {
if ($gas[$kk] -gt $bestG) { $bestG = $gas[$kk]; $bestK = $kk }
}
if ($bestG -ge $GasReapplyThreshold) { $tkMid = $bestK }
}
}
if ($DebugEventTrace.IsPresent) {
[void]$debugRows.Add([pscustomobject]@{
Phase = 'global_gap_probe'
Sector = ('T{0}->T{1}' -f $brakeEvents[$bi].Sector, $brakeEvents[$bi + 1].Sector)
k0 = $g0
k1 = $g1
searchBrakeK0 = ''
bk = $kA
brkEnd = $kB
gasSearchK0 = $g0
tkRise = ''
tkSustain = ''
tkReapply = ''
tkPicked = $tkMid
tkSource = if ($tkMid -ge 0) { 'global_probe_hit' } else { 'global_probe_miss' }
secMaxGas = ($gas[$g0..$g1] | Measure-Object -Maximum).Maximum
secMaxBrk = ($brk[$g0..$g1] | Measure-Object -Maximum).Maximum
})
}
if ($tkMid -ge 0) {
[void]$events.Add([pscustomobject]@{
K = $tkMid
Kind = 'gas'
Sector = 0
Source = 'global_gap_fill_overlap_ok'
GasValue = [int]$gas[$tkMid]
Speed = [int][math]::Round($sp[$tkMid], 0)
Px = $pxi[$tkMid]
Py = $pzi[$tkMid]
})
if ($DebugEventTrace.IsPresent) {
[void]$debugRows.Add([pscustomobject]@{
Phase = 'global_gap_fill'
Sector = ('T{0}->T{1}' -f $brakeEvents[$bi].Sector, $brakeEvents[$bi + 1].Sector)
k0 = $g0
k1 = $g1
searchBrakeK0 = ''
bk = $brakeEvents[$bi].K
brkEnd = $brakeEvents[$bi + 1].K
gasSearchK0 = $g0
tkRise = ''
tkSustain = ''
tkReapply = ''
tkPicked = $tkMid
tkSource = 'global_gap_fill'
secMaxGas = ($gas[$g0..$g1] | Measure-Object -Maximum).Maximum
secMaxBrk = ($brk[$g0..$g1] | Measure-Object -Maximum).Maximum
})
}
}
}
$orderedEvents = @($events | Sort-Object K, Kind)
}
# Second-pass robust补漏(仅连续刹车之间):
# If a brake-to-brake gap still has no gas marker, insert one at max-gas position in that gap.
if ($AllowOverlapThrottleBetweenBrakes) {
$orderedEvents = @($events | Sort-Object K, Kind)
$brakeEvents2 = @($orderedEvents | Where-Object { $_.Kind -eq 'brake' } | Sort-Object K)
if ($brakeEvents2.Count -ge 2) {
for ($bi2 = 0; $bi2 -lt $brakeEvents2.Count - 1; $bi2++) {
$kA2 = [int]$brakeEvents2[$bi2].K
$kB2 = [int]$brakeEvents2[$bi2 + 1].K
if (($kB2 - $kA2) -lt 3) { continue }
$hasGasBetween2 = $false
foreach ($evx in $orderedEvents) {
if ($evx.Kind -eq 'gas' -and $evx.K -gt $kA2 -and $evx.K -lt $kB2) {
$hasGasBetween2 = $true
break
}
}
if ($hasGasBetween2) { continue }
$g02 = $kA2 + 1
$g12 = $kB2 - 1
$bestK2 = -1
$bestG2 = -1
for ($kk2 = $g02; $kk2 -le $g12; $kk2++) {
if ($gas[$kk2] -gt $bestG2) { $bestG2 = $gas[$kk2]; $bestK2 = $kk2 }
}
if ($bestK2 -ge 0 -and $bestG2 -ge $GasReapplyThreshold) {
[void]$events.Add([pscustomobject]@{
K = $bestK2
Kind = 'gas'
Sector = 0
Source = 'global_gap_force_max'
GasValue = [int]$gas[$bestK2]
Speed = [int][math]::Round($sp[$bestK2], 0)
Px = $pxi[$bestK2]
Py = $pzi[$bestK2]
})
}
}
$orderedEvents = @($events | Sort-Object K, Kind)
}
}
# Rule: between two consecutive brake points, keep at most one gas point.
if ($orderedEvents.Count -gt 0) {
$removeIdx = New-Object 'System.Collections.Generic.HashSet[int]'
$brakeIdx = New-Object System.Collections.Generic.List[int]
for ($i = 0; $i -lt $orderedEvents.Count; $i++) {
if ($orderedEvents[$i].Kind -eq 'brake') { [void]$brakeIdx.Add($i) }
}
for ($bi3 = 0; $bi3 -lt $brakeIdx.Count - 1; $bi3++) {
$ia = $brakeIdx[$bi3]
$ib = $brakeIdx[$bi3 + 1]
$gasCandidates = New-Object System.Collections.Generic.List[int]
for ($i = $ia + 1; $i -lt $ib; $i++) {
if ($orderedEvents[$i].Kind -eq 'gas') { [void]$gasCandidates.Add($i) }
}
if ($gasCandidates.Count -le 1) { continue }
# Keep earliest gas marker between two brake markers.
$keep = $gasCandidates | Sort-Object { [int]$orderedEvents[$_].K } | Select-Object -First 1
foreach ($gi in $gasCandidates) {
if ($gi -ne $keep) { [void]$removeIdx.Add([int]$gi) }
}
}
if ($removeIdx.Count -gt 0) {
$filtered = New-Object System.Collections.Generic.List[object]
for ($i = 0; $i -lt $orderedEvents.Count; $i++) {
if (-not $removeIdx.Contains($i)) { [void]$filtered.Add($orderedEvents[$i]) }
}
$orderedEvents = $filtered.ToArray()
}
}
foreach ($ev in $orderedEvents) {
$markerId++
$lbl = ('A{0} {1} km/h' -f $markerId, $ev.Speed)
if ($ev.Kind -eq 'brake') {
$pl = New-LabelPlacement $g $fontMk $lbl $ev.Px $ev.Py $bmpW $bmpH $occupied $bOff
$g.FillEllipse($brushRed, $ev.Px - 7, $ev.Py - 7, 14, 14)
} else {
$pl = New-LabelPlacement $g $fontMk $lbl $ev.Px $ev.Py $bmpW $bmpH $occupied $gOff
$g.FillEllipse($brushGreen, $ev.Px - 7, $ev.Py - 7, 14, 14)
}
Draw-StringWithLeader $g $fontMk $brushTxt $penLeader $ev.Px $ev.Py $lbl $pl
}
if ($DebugEventTrace.IsPresent) {
$aRows = New-Object System.Collections.Generic.List[object]
$aId = 0
foreach ($ev in $orderedEvents) {
$aId++
[void]$aRows.Add([pscustomobject]@{
Phase = 'A_sequence'
Sector = if ($ev.Sector -gt 0) { 'T' + $ev.Sector } else { '-' }
A = 'A' + $aId
Kind = $ev.Kind
Source = $ev.Source
K = $ev.K
AbsFrame = $idx[$ev.K]
ArcS_m = [Math]::Round($s[$ev.K], 3)
Speed_kmh = $ev.Speed
})
}
$gapRows = New-Object System.Collections.Generic.List[object]
$brOnly = @($aRows | Where-Object { $_.Kind -eq 'brake' })
for ($gi = 0; $gi -lt $brOnly.Count - 1; $gi++) {
$a = $brOnly[$gi]
$b = $brOnly[$gi + 1]
$ka = [int]$a.K; $kb = [int]$b.K
if (($kb - $ka) -lt 2) { continue }
$lo = $ka + 1; $hi = $kb - 1
$hasGas = ($aRows | Where-Object { $_.Kind -eq 'gas' -and [int]$_.K -gt $ka -and [int]$_.K -lt $kb } | Select-Object -First 1)
$maxGas = ($gas[$lo..$hi] | Measure-Object -Maximum).Maximum
$maxBrk = ($brk[$lo..$hi] | Measure-Object -Maximum).Maximum
$run180 = Get-LongestRunAbove $gas $lo $hi 180
$run60 = Get-LongestRunAbove $gas $lo $hi 60
$run40 = Get-LongestRunAbove $gas $lo $hi 40
[void]$gapRows.Add([pscustomobject]@{
Phase = 'brake_gap'
Sector = ($a.A + '->' + $b.A)
A = ''
Kind = ''
Source = if ($hasGas) { 'has_gas' } else { ("no_gas(run180={0},run60={1},run40={2})" -f $run180, $run60, $run40) }
K = "$lo..$hi"
AbsFrame = "$($idx[$lo])..$($idx[$hi])"
ArcS_m = [Math]::Round(($s[$lo] + $s[$hi]) / 2.0, 3)
Speed_kmh = ''
MaxGas = $maxGas
MaxBrake = $maxBrk
})
}
$all = @($debugRows + $aRows + $gapRows) | ForEach-Object {
[pscustomobject]@{
Phase = if ($_.PSObject.Properties.Name -contains 'Phase') { $_.Phase } else { '' }
Sector = if ($_.PSObject.Properties.Name -contains 'Sector') { $_.Sector } else { '' }
A = if ($_.PSObject.Properties.Name -contains 'A') { $_.A } else { '' }
Kind = if ($_.PSObject.Properties.Name -contains 'Kind') { $_.Kind } else { '' }
Source = if ($_.PSObject.Properties.Name -contains 'Source') { $_.Source } else { '' }
K = if ($_.PSObject.Properties.Name -contains 'K') { $_.K } else { '' }
AbsFrame = if ($_.PSObject.Properties.Name -contains 'AbsFrame') { $_.AbsFrame } else { '' }
ArcS_m = if ($_.PSObject.Properties.Name -contains 'ArcS_m') { $_.ArcS_m } else { '' }
Speed_kmh = if ($_.PSObject.Properties.Name -contains 'Speed_kmh') { $_.Speed_kmh } else { '' }
MaxGas = if ($_.PSObject.Properties.Name -contains 'MaxGas') { $_.MaxGas } else { '' }
MaxBrake = if ($_.PSObject.Properties.Name -contains 'MaxBrake') { $_.MaxBrake } else { '' }
k0 = if ($_.PSObject.Properties.Name -contains 'k0') { $_.k0 } else { '' }
k1 = if ($_.PSObject.Properties.Name -contains 'k1') { $_.k1 } else { '' }
searchBrakeK0 = if ($_.PSObject.Properties.Name -contains 'searchBrakeK0') { $_.searchBrakeK0 } else { '' }
bk = if ($_.PSObject.Properties.Name -contains 'bk') { $_.bk } else { '' }
brkEnd = if ($_.PSObject.Properties.Name -contains 'brkEnd') { $_.brkEnd } else { '' }
gasSearchK0 = if ($_.PSObject.Properties.Name -contains 'gasSearchK0') { $_.gasSearchK0 } else { '' }
tkRise = if ($_.PSObject.Properties.Name -contains 'tkRise') { $_.tkRise } else { '' }
tkSustain = if ($_.PSObject.Properties.Name -contains 'tkSustain') { $_.tkSustain } else { '' }
tkReapply = if ($_.PSObject.Properties.Name -contains 'tkReapply') { $_.tkReapply } else { '' }
tkPicked = if ($_.PSObject.Properties.Name -contains 'tkPicked') { $_.tkPicked } else { '' }
tkSource = if ($_.PSObject.Properties.Name -contains 'tkSource') { $_.tkSource } else { '' }
secMaxGas = if ($_.PSObject.Properties.Name -contains 'secMaxGas') { $_.secMaxGas } else { '' }
secMaxBrk = if ($_.PSObject.Properties.Name -contains 'secMaxBrk') { $_.secMaxBrk } else { '' }
}
}
$all | Export-Csv -LiteralPath $DebugOutputPath -NoTypeInformation -Encoding UTF8
$a1415 = $gapRows | Where-Object { $_.Sector -eq 'A14->A15' } | Select-Object -First 1
if ($null -ne $a1415) {
Write-Host ("Debug A14->A15: source={0} maxGas={1} maxBrake={2} gapK={3}" -f $a1415.Source, $a1415.MaxGas, $a1415.MaxBrake, $a1415.K)
}
Write-Host "Debug trace saved: $DebugOutputPath"
}
$sub = ('dt={0}ms brake>={1}s thr={2} gas>={3} expand={4}m' -f [int]($dt * 1000), $BrakeMinSeconds, $ThrottleMinSeconds, $GasPedalThreshold, $SectorExpandMeters)
$title = $cap.titlePrefix + ' Lap=' + $Lap + ' L=' + [math]::Round($lapLen, 0) + 'm ' + $sub + ' ' + (Get-Date -Format 'yyyy-MM-dd HH:mm')
$g.DrawString($title, $fontTitle, $brushTxt, 10.0, 8.0)
$leg = $cap.legend + ' | ' + $sub
$g.DrawString($leg, $fontMk, $brushTxt, 10.0, [float]($bmpH - 42))
$bmp.Save($OutputPath, [System.Drawing.Imaging.ImageFormat]::Png)
$g.Dispose(); $bmp.Dispose()
$penTrace.Dispose(); $penLeader.Dispose()
$brushRed.Dispose(); $brushGreen.Dispose(); $brushTxt.Dispose(); $brushSf.Dispose()
$fontTitle.Dispose(); $fontMk.Dispose()
Write-Host "Saved: $OutputPath"
打包exe
没想到打包exe,这个简单的需求反而是最麻烦的,最难处理的。
AI生成的都是powershell的脚本,我想把它打包成一个exe,可以方便使用一些。
打包 exe 重写了三遍,第一遍打包 exe 还要调用脚本,那这个 exe 的意义何在;第二遍打包各种路径弄不对;第三遍打包增加测试方法以后,总算给出来一个能用的 exe 了。
#Requires -Version 5.1
# 将 BuildIdealLineFromReplay.ps1 / DrawZhuhaiLapCorners.ps1 打成 exe。
# 先输出到 %TEMP% 再复制到 tools,避免目标 exe 被占用时 PS2EXE 无法删除旧文件导致打包失败。
$ErrorActionPreference = 'Stop'
$here = $PSScriptRoot
Import-Module (Join-Path $here 'ps2exe-module\ps2exe.psd1') -Force
function Stop-ToolProcess([string]$exeFileName) {
$base = [IO.Path]::GetFileNameWithoutExtension($exeFileName)
Get-Process -Name $base -ErrorAction SilentlyContinue | Stop-Process -Force -ErrorAction SilentlyContinue
}
function Copy-ExeToTools {
param([string]$TempExe, [string]$DestExe)
Copy-Item -LiteralPath $TempExe -Destination $DestExe -Force
}
$targets = @(
@{ In = 'BuildIdealLineFromReplay.ps1'; Out = 'BuildIdealLineFromReplay.exe'; Title = 'BuildIdealLineFromReplay'; ConHost = $true },
@{ In = 'DrawZhuhaiLapCorners.ps1'; Out = 'DrawZhuhaiLapCorners.exe'; Title = 'DrawZhuhaiLapCorners'; ConHost = $false }
)
foreach ($t in $targets) {
$inPath = Join-Path $here $t.In
$outPath = Join-Path $here $t.Out
Write-Host "Building $outPath ..."
Stop-ToolProcess $t.Out
Start-Sleep -Milliseconds 400
$tmp = Join-Path $env:TEMP ('ps2exe_' + [guid]::NewGuid().ToString('N') + '_' + $t.Out)
try {
# Draw:System.Drawing 用 -STA;-conHost 会导致脚本未跑完、PNG 不落盘。
# BuildIdealLine:-conHost 便于无控制台/部分自动化场景结束等待。
if ($t.ConHost) {
Invoke-ps2exe -inputFile $inPath -outputFile $tmp -conHost -title $t.Title
} else {
Invoke-ps2exe -inputFile $inPath -outputFile $tmp -STA -noConsole:$false -title $t.Title
}
Copy-ExeToTools -TempExe $tmp -DestExe $outPath
Write-Host " -> $outPath"
} finally {
Remove-Item -LiteralPath $tmp -Force -ErrorAction SilentlyContinue
}
}
Write-Host 'Done.'
Summary
最终生成的代码如下,也一起打包了exe
https://github.com/elmagnificogi/ACRecord2AILine.git
对于AI来完成一个项目一些前提:
- 项目是否可行,前期需要一些验证性的方案摸底,确定技术方案是否可行,以及AI使用何种方案进行
- 需求需要明确,越细致越好
- AI生成的结果需要有基础的测试用例,能量化到具体数值、行为、结果最好,图片化的结果比较麻烦需要人工反馈,给AI自己识别还是存在一定误差的
- 建议最好把需求点拆成一个阶段一个阶段的,每一步都完成验证以后再进行下一步,而不是一个总体目标和测试结果,会导致AI自己卡在其中反复迭代,无限消耗token,还得不到要的结果
- 这一点要着重强调,实际上Cursor有200K的上下文,而AI一旦陷入其中就会出现上下文不够用的情况,继而导致核心需求或者描述的上下文被丢失,AI进入恶性循环中,再也出不去
再完成转exe和画分析图的过程中都出现了上下文不够用的情况,我只好重新总结要求,新开一个agent再次进行,而这样再次进行的上下文大概只用了1/3就完成了所有新工作
当AI出现试错或者走向错误分支的时候,这部分上下文可能会占用很多tokens消耗,最好人工发现以后,简单总结,避免再走向错误的道路中
![]()
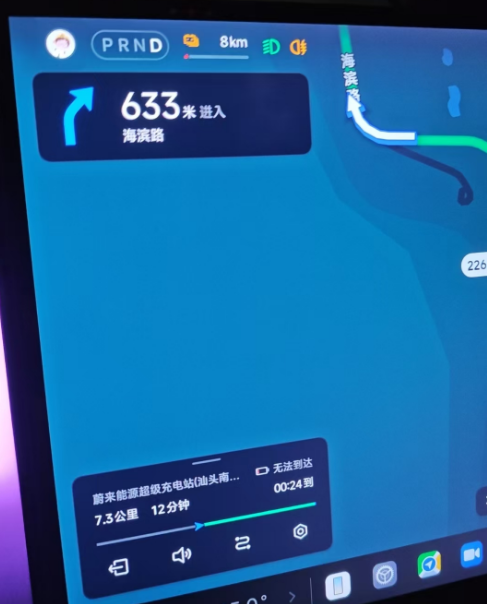
一共就写这么不到 2000 行的代码,2 个需求 + 一个 CI 打包,去掉我 4 月前几天的消耗,大概 400 万 tokens,完成这个消耗了 5400 万 tokens,这里面有很多 cache,但是总体量就得有这么多,平均一行代码消耗 2 万多 tokens,还是很恐怖的。
这么一个需求消耗了接近1/3的Cursor用量,核算下来大概是5刀,30来块钱,看起来挺少的,但是总共耗时大概是7-8小时,是我全程辅助以后的结果。
如果给我7-8小时,纯工作时间,估计也能做到差不多的程度,但是消耗的脑力就很多了,我需要从头开始学习和实验。
后续如果再用AI做需求,再完善一下方法论,再给到AI应该会更快更好一些。