ARM Cortex M0移植到FPGA
综述
本文将介绍如何将DesignStart Eval的示例SoC移植到FPGA上,该SoC使用M0内核。在开始之前,简明阐述本文实现思路,移植可分为两部分:硬件与软件。
- 硬件移植:Verilog代码的移植、综合、布局布线与调试;在DesignStart Eval的包文件中,...\systems\cortex_m0_mcu\verilog文件夹下实现的有一参考示例,复制所需文件即可。
- 软件移植:基于CMSIS与参考代码制作自己的库函数,寄存器的配置均需要与RTL中配置的保持一致。
移植该项目时,参考了许多官方文档与第三方书籍,其中最有价值的列举如下:
- DUI0926B_cortex_m0_designstart_eval_guide.pdf,该手册介绍了示例SoC的结构与细节,用于硬件搭建。
- DDI0479C_cortex_m_system_design_kit_r1p0_trm.pdf,该手册介绍了CMSDK系统模块,在后期构建库函数时颇有用处。
- AMBA总线规范中文版V2.0.pdf,介绍了AMBA规范下各个接口的协议。
- ARM Cortex-M0全可编程SoC原理及实现.pdf,总体上描述了M0的技术细节。
SoC概括
该SoC来自官方示例,可在systems文件夹下找到,顶层文件为cmsdk_mcu.v,我们要做的是:
- 复制所需文件,包括M0核心与CMSDK文件。
- 例化ROM/RAM,在FPGA内部二者均使用SRAM实现,在顶层文件中将
cmsdk_ahb_rom与cmsdk_ahb_ram的MEM_TYPE均修改为2,即用于FPGA。 - 开启SWD调试的电源,找到cmsdk_mcu_system.v,在其核心例化文件中修改即可。
- 新建顶层文件,加入MMCM用于配置时钟。
- 将IO口绑定引脚,综合、布局布线、下载调试,笔者使用的是CMSIS-DAP。
实现的SoC总体框架为:

该SoC的AHB地址映射为:
| 内存地址 | 功能 |
|---|---|
| 0x00000000-0x003FFFFF | ROM,大小为2^AW |
| 0x20000000-0x207FFFFF | RAM,大小为2^AW |
| 0x40000000-0x4000FFFF | APB外设挂载地址 |
| 0x40010000-0x40010FFF | GPIO #0 |
| 0x40011000-0x40011FFF | GPIO #1 |
| 0x4001F000-0x4001FFFF | 系统控制寄存器 |
| 0xF0000000-0xF0000400 | 系统ROM表 |
该SoC的APB地址映射为:
| 内存地址 | 功能 |
|---|---|
| 0x40000000-0x40000FFF | Timer0 |
| 0x40001000-0x40001FFF | Timer1 |
| 0x40002000-0x40002FFF | Dual Timer |
| 0x40004000-0x40004FFF | UART0 |
| 0x40005000-0x40005FFF | UART1 |
| 0x40006000-0x40006FFF | UART2 |
| 0x40008000-0x40008FFF | Watchdog |
| 0x4000B000-0x4000BFFF | APB test slave |
准备文件
示例SoC的顶层视图:

进入到.../systems/cortex_m0_mcu/verilog文件夹,除去tb_cmsdk_mcu.v、tbench_M0_DS.vc、cmsdk_uart_capture.v、cmsdk_clkreset外均用于本SoC的构建。其余文件功能描述如下(参考自DUI0926B 2.3.1):
- cmsdk_mcu:示例SoC的顶层文件,包含SoC核心与存储器。
- cmsdk_mcu_system:SoC核心,包含M0核心与CMSDK外设。
- cmsdk_mcu_clkctrl:SoC的时钟与复位控制模块。
- cmsdk_mcu_pin_mux:用于GPIO端口的功能复用,在输入、输出、复用三种功能内选择。
- cmsdk_mcu_addr_decode:根据地址映射关系生成选择器信号。
- cmsdk_mcu_defs:头文件,用于配置存储器的顺序与非顺序等待。
- cmsdk_mcu_sysctrl:SoC的系统控制模块。
- cmsdk_mcu_stclkctrl:SysTick信号的控制模块,用于生成系统嘀嗒信号。
- cmsdk_ahb_cs_rom_table.v:CoreSight系统ROM表,用于调试。
准备完成MCU部分后,需要复制M0内核与CMSDK,通过顶层文件向下遍历需要的模块即可。该SoC主要包含如下内容:
- M0内核(.../cores/cortexm0_designstart_r2p0/logical/):在DesignStart Kit中代码已被混淆,仅可使用SWD调试,AHB-Lite总线仅支持单主机。(参考自DUI0926B 1.3.2)
- AHB与APB总线:AMBA定义的标准总线协议,APB主要用于挂在低速外设接口,二者通过AHB to APB桥进行转接。
- RAM/ROM:FPGA内部均使用SRAM实现。
- Timer:定时器,包括Simple Timer与Dual Timer。
- UART:串口,用于数据交互。
- Watchdog:看门狗,用于程序错误执行时的复位。
一个完整的设计包括有如下文件,注意cmsdk_fpga_rom模块同样使用SRAM实现,同时需修改入口参数为filename:

例化存储器
该SoC的存储器例化使用cmsdk_ahb_rom.v与cmsdk_ahb_ram.v,具体的文件结构如下:

cmsdk_ahb_rom模块的例化参数有:
- MEM_TYPE:选择为2,意为AHB_ROM_FPGA_SRAM_MODEL。
- AW:地址宽度,实际的存储器大小为2^AW。
- filename:运行在M0上的程序镜像。
- WS_N、WS_S:连续与非连续读写,意为Non-Sequential或Sequential。
- BE:指定SoC程序的大小端,意为Big endian。
当RAM与ROM的大小均设置为16KB时,工程综合布局布线后的资源占用为(使用Vivado 2018.2,XC7Z010CLG400-1):

配置SWD
在该示例SoC中,默认关闭了SWD调试的电源,因此需要手动开启。在cmsdk_mcu_system.v中例化M0内核时,将调试线的REQ与ACK连接,如下:
wire debug_power_req_ack;
...
.CDBGPWRUPREQ (debug_power_req_ack),
.CDBGPWRUPACK (debug_power_req_ack),
...
新建顶层
由于需要添加加速器与时钟控制,因此新建顶层文件添加MMCM模块,注意在不同的平台上时钟IP核不同,需要额外修改。示例如下,本设计使用50M系统时钟:
module top(
input in_clk,
input in_rst_n,
inout SWD,
input SWCLK,
input SWRST,
inout [15:0] P0,
inout [15:0] P1
);
wire sys_clk,sys_rst_n,mmcm_locked;
assign sys_rst_n = mmcm_locked & in_rst_n;
mmcm u_mmcm(
// Clock out ports
.clk_out1(sys_clk), // output clk_out1
// Status and control signals
.resetn(in_rst_n), // input resetn
.locked(mmcm_locked), // output locked
// Clock in ports
.clk_in1(in_clk) // input clk_in1
);
parameter BE = 0; // Big or little endian
parameter BKPT = 4; // Number of breakpoint comparators
parameter DBG = 1; // Debug configuration
parameter NUMIRQ = 32; // NUM of IRQ
parameter SMUL = 0; // Multiplier configuration
parameter SYST = 1; // SysTick
parameter WIC = 0; // Wake-up interrupt controller support
parameter WICLINES = 34; // Supported WIC lines
parameter WPT = 2; // Number of DWT comparators
cmsdk_mcu #(
.BE(BE),
.BKPT(BKPT),
.DBG(DBG),
.NUMIRQ(NUMIRQ),
.SMUL(SMUL),
.SYST(SYST),
.WIC(WIC),
.WICLINES(WICLINES),
.WPT(WPT)
)
u_cmsdk_mcu(
.XTAL1(sys_clk), // input
.XTAL2(), // output
.NRST(sys_rst_n), // active low reset
.P0(P0),
.P1(P1),
.nTRST(SWRST),
.TDI(),
.TDO(),
.SWDIOTMS(SWD),
.SWCLKTCK(SWCLK)
);
endmodule
调试
编写XDC约束文件,比特流生成完成后下载到FPGA开发板上,将调试器正确连接。注意,必须使用支持SWD的调试器,譬如ST-Link、CMSIS-DAP、Jink等。
在XADC中看到芯片温度有明显上升,一般可将此判断芯片成功下载的一个依据。

-
连接调试端口SWD,SCLK,GND与串口UART0(用于打印调试信息),打开.../systems/cortex_m0_mcu/testcodes/hello下的Keil工程。
注意在打开前,最好在Keil官网下载安装CMSIS的支持包,名称为Keil.V2M-MPS2_CMx_BSP.1.7.1.pack。
-
修改内存地址,在Target选项卡的Memory Areas。我这里RAM/ROM均修改为16K,其中Start保持不变,改变Size即可。

-
打开工程配置界面的Debug标签,选择正确的调试器,我这里选择的是CMSIS-DAP Debugger。
-
在调试器Settings中将Port设置为SW,一切正常的话可以在SW Device中看到当前连接的设备。

-
取消对Flash的操作,在FPGA内部对其操作并无太大意义,在此跳过烧录时的Flash操作。

-
点击Keil主界面上的Start/Stop Debug Session,由于还未添加Flash烧录算法此时会提示No Flash Operation,不影响运行与调试。

-
设置
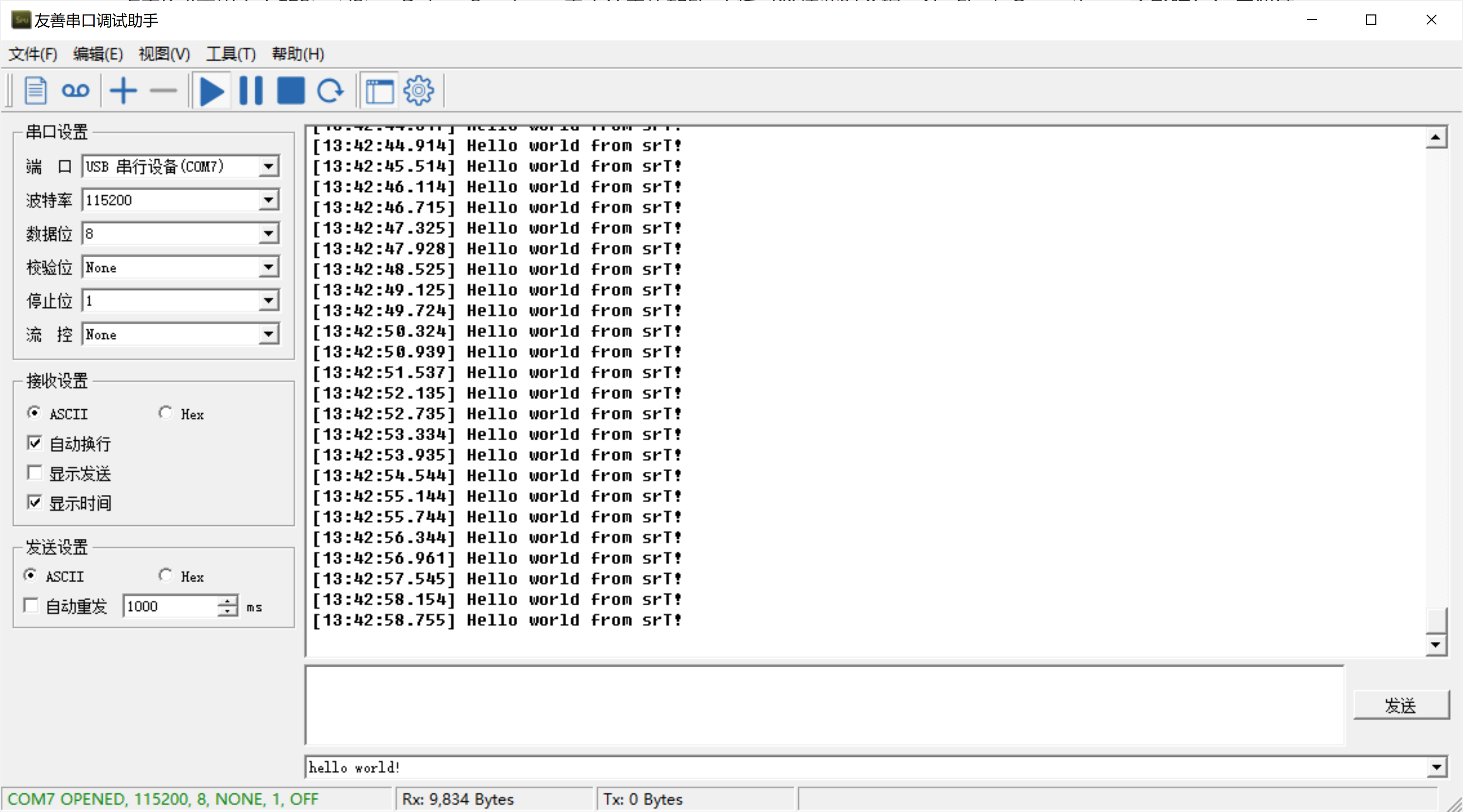
UartStdOutInit();函数,计算合适的BAUDDIV与CTRL。CMSIS外设均在DDI0479C文章中有所记载,下节将详述,本节给出50M下的配置代码。void UartStdOutInit(void) { CMSDK_UART0->BAUDDIV = 434; //The APB clock is 50M, the register is 50,000,000/115200 = 434 CMSDK_UART0->CTRL = 0x03; // Enable TX&RX CMSDK_GPIO1->ALTFUNCSET = (1<<1); // Port enable return; } -
打开串口调试助手,设置波特率到115200即可收到调试信息。
其它
在完成硬件移植并成功启动一起Hello World示例后,将会逐步移植Systick与GPIO,将其封装在库函数中供调用。读者可参考DDI0479C手册进行移植,下节将详细介绍。