Apple M1 (Firestorm & Icestorm) 微架构评测¶
虽然 Apple M1 已经是 2020 年的处理器,但它对苹果自研芯片来说是一个里程碑,考虑到 X Elite 处理器的 Oryon 微架构和 Apple M1 性能核 Firestorm 微架构的相似性,还是测试一下这个 Firestorm + Icestorm 微架构在各个方面的表现。Apple A14 采用了和 Apple M1 一样的微架构。
官方信息¶
Apple M1 的官方信息乏善可陈,关于微架构的信息几乎为零,但能从操作系统汇报的硬件信息中找到一些内容。
现有评测¶
网上已经有较多针对 Apple M1 微架构的评测和分析,建议阅读:
下面分各个模块分别记录官方提供的信息,以及实测的结果。读者可以对照已有的第三方评测理解。官方信息与实测结果一致的数据会加粗。
Benchmark¶
Apple Firestorm/Icestorm 的性能测试结果见 SPEC。
环境准备¶
Apple M1 预装的是 macOS,macOS 的绑核只能绑到 P 或者 E,不能具体到某一个核上;在 macOS 上可以读取 PMU,需要使用 kpep 的私有框架,代码可以在这里找到。
如果想更方便地进行测试,建议安装 Asahi Linux 的各种发行版,此时可以在 Linux 下自由地绑核,也可以用标准的方式使用 PMU。
取指带宽¶
Firestorm¶
为了测试实际的 Fetch 宽度,参考 如何测量真正的取指带宽(I-fetch width) - JamesAslan 构造了测试。
其原理是当 Fetch 要跨页的时候,由于两个相邻页可能映射到不同的物理地址,如果要支持单周期跨页取指,需要查询两次 ITLB,或者 ITLB 需要把相邻两个页的映射存在一起。这个场景一般比较少,处理器很少会针对这种特殊情况做优化,但也不是没有。经过测试,把循环放在两个页的边界上,发现 Firestorm 微架构遇到跨页的取指时确实会拆成两个周期来进行。
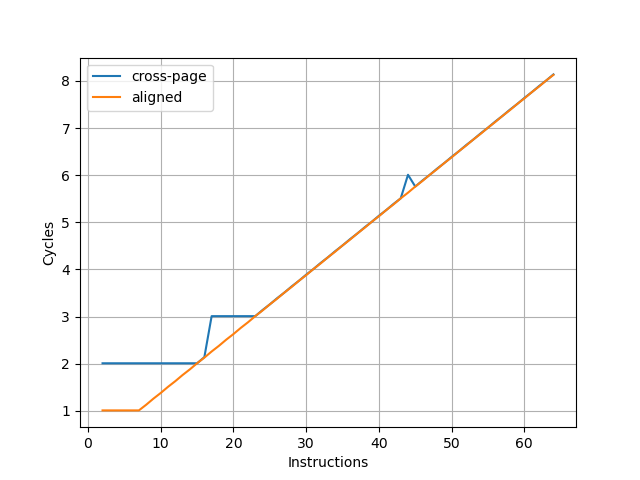
在此基础上,构造一个循环,循环的第一条指令放在第一个页的最后四个字节,其余指令放第二个页上,那么每次循环的取指时间,就是一个周期(读取第一个页内的指令)加上第二个页内指令需要 Fetch 的周期数,多的这一个周期就足以把 Fetch 宽度从后端限制中区分开,实验结果如下:

图中蓝线(cross-page)表示的就是上面所述的第一条指令放一个页,其余指令放第二个页的情况,横坐标是第二个页内的指令数,那么一次循环的指令数等于横坐标 +1。纵坐标是运行很多次循环的总 cycle 数除以循环次数,也就是平均每次循环耗费的周期数。可以看到每 16 条指令会多一个周期,因此 Firestorm 的前端取指宽度确实是 16 条指令。
为了确认这个瓶颈是由取指造成的,又构造了一组实验,把循环的所有指令都放到一个页中,这个时候 Fetch 不再成为瓶颈(图中 aligned),两个曲线的对比可以明确地得出上述结论。
随着指令数进一步增加,最终瓶颈在每周期执行的 NOP 指令数,因此两条线重合。
Icestorm¶
用相同的方式测试 Icestorm,结果如下:
可以看到每 8 条指令会多一个周期,意味着 Icestorm 的前端取指宽度为 8 条指令。
L1 ICache¶
官方信息:通过 sysctl 可以看到,Firestorm 具有 192KB L1 ICache,Icestorm 具有 128KB L1 ICache:
hw.perflevel0.l1icachesize: 196608hw.perflevel1.l1icachesize: 131072
Firestorm¶
为了测试 L1 ICache 容量,构造一个具有巨大指令 footprint 的循环,由大量的 nop 和最后的分支指令组成。观察在不同 footprint 大小下 Firestorm 的 IPC:
可以看到 footprint 在 192 KB 之前时可以达到 8 IPC,之后则快速降到 2.22 IPC,这里的 192 KB 就对应了 Firestorm 的 L1 ICache 的容量。虽然 Fetch 可以每周期 16 条指令,也就是一条 64B 的缓存行,由于后端的限制,只能观察到 8 的 IPC。
Icestorm¶
用相同的方式测试 Icestorm,结果如下:
可以看到 footprint 在 128 KB 之前时可以达到 4 IPC,之后则快速降到 2.10 IPC,这里的 128 KB 就对应了 Icestorm 的 L1 ICache 的容量。虽然 Fetch 可以每周期 8 条指令,由于后端的限制,只能观察到 4 的 IPC。
BTB¶
Firestorm¶
构造大量的无条件分支指令(B 指令),BTB 需要记录这些指令的目的地址,那么如果分支数量超过了 BTB 的容量,性能会出现明显下降。当把大量 B 指令紧密放置,也就是每 4 字节一条 B 指令时:
可见在 1024 个分支之内可以达到 1 的 CPI,超过 1024 个分支,出现了 3 CPI 的平台,一直延续到 49152 个分支。超出 BTB 容量以后,分支预测时,无法从 BTB 中得到哪些指令是分支指令的信息,只能等到取指甚至译码后才能后知后觉地发现这是一条分支指令,这样就出现了性能损失,出现了 3 CPI 的情况。第二个拐点 49152,对应的是指令 footprint 超出 L1 ICache 的情况:L1 ICache 是 192KB,按照每 4 字节一个 B 指令计算,最多可以存放 49152 条 B 指令。
降低分支指令的密度,在 B 指令之间插入 NOP 指令,使得每 8 个字节有一条 B 指令,得到如下结果:
可以看到 CPI=1 的拐点前移到 1024 个分支,同时 CPI=3 的平台的拐点也前移到了 24576。拐点的前移,意味着 BTB 采用了组相连的结构,当 B 指令的 PC 的部分低位总是为 0 时,组相连的 Index 可能无法取到所有的 Set,导致表现出来的 BTB 容量只有部分 Set,例如此处容量减半,说明只有一半的 Set 被用到了。
如果进一步降低 B 指令的密度,使得它的低若干位都等于 0,最终 CPI=1 的拐点定格在 2 条分支,此时分支的间距大于或等于 2048B;CPI=3 的拐点定格在 6 条分支,此时分支的间距大于或等于 32KB。根据这个信息,可以认为 Firestorm 的 BTB 是 512 Set 2 Way 的结构,Index 是 PC[10:2];同时也侧面佐证了 192KB L1 ICache 是 512 Set 6 Way,Index 是 PC[14:6]。
Icestorm¶
用相同的方式测试 Icestorm,首先用 4B 的间距:
可以看到 1024 的拐点,1024 之前是 1 IPC,之后增加到 3 IPC。比较奇怪的是,没有看到第二个拐点,第二个拐点在 8B 的间距下显现:
第一个拐点前移到 512,第二个拐点出现在 16384,而 Icestorm 的 L1 ICache 容量是 128KB,8B 间距下正好可以保存 16384 个分支。
用 16B 间距测试:
第一个拐点前移到 256,然后出现了一个 2 CPI 的新平台,2 CPI 的平台的拐点出现在 2048,第三个拐点出现在 8192,对应 L1 ICache 容量。
用 32B 间距测试:
第一个拐点在 1024,第二个拐点出现在 4096,对应 L1 ICache 容量,没有观察到 2 CPI。
用 64B 间距测试:
第一个拐点在 512,第二个拐点出现在 2048,对应 L1 ICache 容量。
Icestorm 的 BTB 测试结果并不像 Firestorm 那样有规律,根据这个现象,给出一些猜测:
- 可能只有一级 BTB,但它的 Index 函数进行了一些 Hash 而非直接取 PC 某几位,使得随着分支的间距增大,CPI=1 的拐点并非单调递减;但这无法解释为何 16B 间距时会出现 2 CPI 的平台
- 可能有两级 BTB,它们并非简单地级联,而是通过不同的组织方式,在不同的区间内发挥作用
针对 4B 间距没有出现 CPI>3 的情况,给出一些猜测:
- 测试规模不够大,把分支数量继续增大,才能出现 CPI>3 的情况
- 指令预取器在工作,当 footprint 大于 128KB L1 ICache 时,能提前把指令取进来
L1 ITLB¶
Firestorm¶
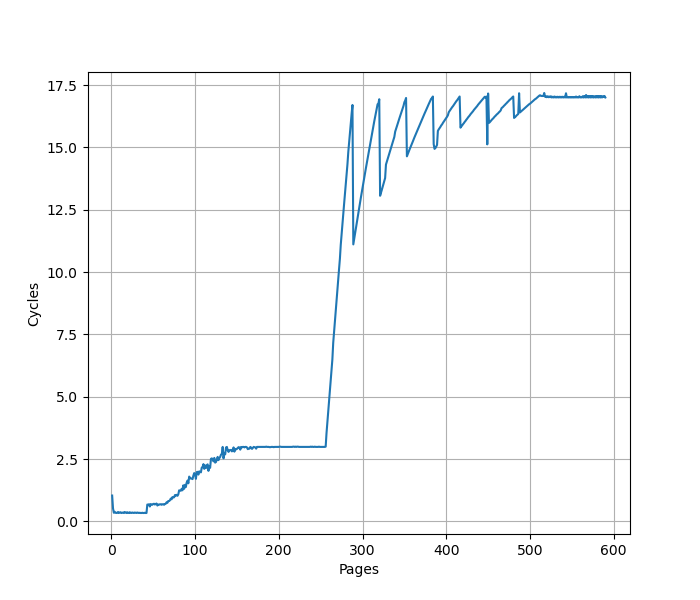
构造一系列的 B 指令,使得 B 指令分布在不同的 page 上,使得 ITLB 成为瓶颈,在 Firestorm 上进行测试:
从 1 Cycle 到 3 Cycle 的增加是由于 L1 BTB 的冲突缺失,之后在 192 个页时从 3 Cycle 快速增加到 13 Cycle,则对应了 192 项的 L1 ITLB 容量。
Icestorm¶
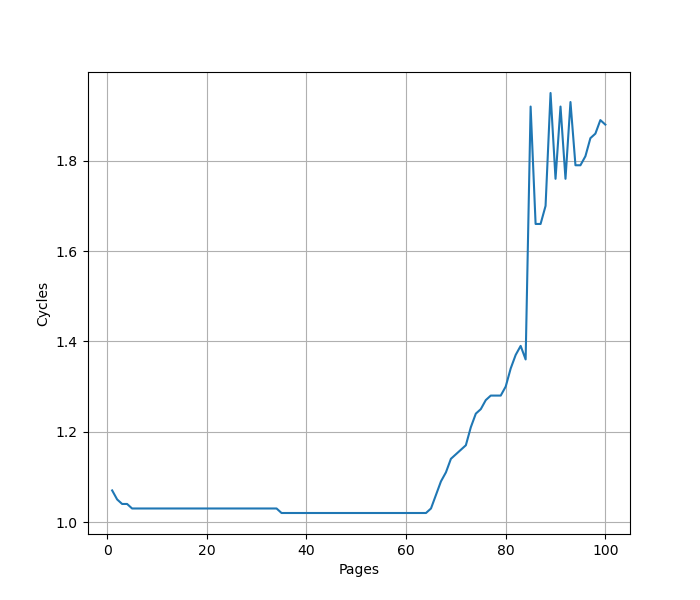
在 Icestorm 上重复实验:
只有一个拐点,在 128 个页时,性能从 1 Cycle 下降到 8 Cycle,意味 L1 ITLB 容量是 128 项。
Decode¶
从前面的测试来看,Firestorm 最大观察到 8 IPC,Icestorm 最大观察到 4 IPC,那么 Decode 宽度也至少是这么多,暂时也不能排除有更大的 Decode 宽度。
Return Stack¶
Firestorm¶
构造不同深度的调用链,测试每次调用花费的平均时间,在 Firestorm 上得到下面的图:
可以看到调用链深度为 50 时性能突然变差,因此 Firestorm 的 Return Stack 深度为 50。
Icestorm¶
在 Icestorm 上测试:
可以看到调用链深度为 32 时性能突然变差,因此 Icestorm 的 Return Stack 深度为 32。
Conditional Branch Predictor¶
参考 Dissecting Conditional Branch Predictors of Apple Firestorm and Qualcomm Oryon for Software Optimization and Architectural Analysis 论文的方法,可以测出 Firestorm 的分支预测器采用的历史更新方式为:
- 使用 100 位的 Path History Register for Target(PHRT) 以及 28 位的 Path History Register for Branch(PHRB),每次执行 taken branch 时更新
- 更新方式为:
PHRTnew = (PHRTold << 1) xor T[31:2], PHRBnew = (PHRBold << 1) xor B[5:2],其中 B 代表分支指令的地址,T 代表分支跳转的目的地址
Icestorm 的分支预测器采用的历史更新方式为:
- 使用 60 位的 Path History Register for Target(PHRT) 以及 16 位的 Path History Register for Branch(PHRB),每次执行 taken branch 时更新
- 更新方式为:
PHRTnew = (PHRTold << 1) xor T[47:2], PHRBnew = (PHRBold << 1) xor B[5:2],其中 B 代表分支指令的地址,T 代表分支跳转的目的地址
各厂商处理器的 PHR 更新规则见 jiegec/cpu。
物理寄存器堆¶
Firestorm¶
为了测试物理寄存器堆的大小,一般会用两个依赖链很长的操作放在开头和结尾,中间填入若干个无关的指令,并且用这些指令来耗费物理寄存器堆。Firestorm 测试结果见下图:
- 32b/64b int:测试 speculative 32/64 位整数寄存器的数量,拐点在 362
- 32b fp:测试 speculative 32 位浮点寄存器的数量,拐点在 382
- flags:测试 speculative NZCV 寄存器的数量,拐点在 123
Icestorm¶
Icestorm 测试结果如下:
- 32b/64b int:测试 speculative 32/64 位整数寄存器的数量,拐点在 78
- 32b fp:测试 speculative 32 位浮点寄存器的数量,拐点在 382
- flags:测试 speculative NZCV 寄存器的数量,拐点在 75
注意这里测试的都是能够用于预测执行的寄存器数量,实际的物理寄存器堆还需要保存架构寄存器。但具体保存多少个架构寄存器不确定,但至少 32 个整数通用寄存器和浮点寄存器是一定有的,但可能还有一些额外的需要重命名的状态也要算进来。
Load Store Unit + L1 DCache¶
L1 DCache 容量¶
官方信息:通过 sysctl 可以看到,Firestorm 具有 128KB L1 DCache,Icestorm 具有 64KB L1 DCache:
hw.perflevel0.l1dcachesize: 131072hw.perflevel1.l1dcachesize: 65536
构造不同大小 footprint 的 pointer chasing 链,测试不同 footprint 下每条 load 指令耗费的时间,Firestorm 上的结果:
可以看到 128KB 出现了明显的拐点,对应的就是 128KB 的 L1 DCache 容量。L1 DCache 范围内延迟是 3 cycle,之后提升到 16 cycle。
Icestorm 上的结果:
可以看到 64KB 出现了明显的拐点,对应的就是 64KB 的 L1 DCache 容量。L1 DCache 范围内延迟是 3 cycle,之后提升到 14 cycle。
L1 DTLB 容量¶
Firestorm¶
用类似的方法测试 L1 DTLB 容量,只不过这次 pointer chasing 链的指针分布在不同的 page 上,使得 DTLB 成为瓶颈,在 Firestorm 上:
从 160 个页开始性能下降,到 250 个页时性能稳定在 9 CPI,认为 Firestorm 的 L1 DTLB 有 160 项。9 CPI 包括了 L1 DTLB miss L2 TLB hit 带来的额外延迟。
如果每两个页放一个指针,则拐点前移到 80;每四个页放一个指针,拐点变成 40;每八个页放一个指针,拐点变成 20;每 16 个页一个指针,拐点是 10;每 32 个页一个指针,拐点变成 5;每 64 个页一个指针,拐点依然是 5。说明 Firestorm 的 L1 DTLB 是 5 路组相连,32 个 Set,Index 是 VA[18:14],注意页表大小是 16KB。
Icestorm¶
Icestorm:
从 128 个页开始性能下降,到 160 个页时性能稳定在 10 CPI,认为 Icestorm 的 L1 DTLB 有 128 项。10 CPI 包括了 L1 DTLB miss L2 TLB hit 带来的额外延迟。
如果每两个页放一个指针,则拐点前移到 64;每四个页放一个指针,拐点变成 32;每八个页放一个指针,拐点变成 16;每 16 个页一个指针,拐点是 8;每 32 个页一个指针,拐点变成 4;每 64 个页一个指针,拐点依然是 4。说明 Icestorm 的 L1 DTLB 是 4 路组相连,32 个 Set,Index 是 VA[18:14]。
Load/Store 带宽¶
Firestorm¶
针对 Load Store 带宽,实测 Firestorm 每个周期可以完成:
- 3x 128b Load + 1x 128b Store
- 2x 128b Load + 2x 128b Store
- 1x 128b Load + 2x 128b Store
- 2x 128b Store
如果把每条指令的访存位宽从 128b 改成 256b,读写带宽不变,指令吞吐减半。也就是说最大的读带宽是 48B/cyc,最大的写带宽是 32B/cyc,二者不能同时达到。
Icestorm¶
实测 Icestorm 每个周期可以完成:
- 2x 128b Load
- 1x 128b Load + 1x 128b Store
- 1x 128b Store
如果把每条指令的访存位宽从 128b 改成 256b,读写带宽不变,指令吞吐减半。也就是说最大的读带宽是 32B/cyc,最大的写带宽是 16B/cyc,二者不能同时达到。
Memory Dependency Predictor¶
为了预测执行 Load,需要保证 Load 和之前的 Store 访问的内存没有 Overlap,那么就需要有一个预测器来预测 Load 和 Store 之前在内存上的依赖。参考 Store-to-Load Forwarding and Memory Disambiguation in x86 Processors 的方法,构造两个指令模式,分别在地址和数据上有依赖:
- 数据依赖,地址无依赖:
str x3, [x1] 和 ldr x3, [x2] - 地址依赖,数据无依赖:
str x2, [x1] 和 ldr x1, [x2]
初始化时,x1 和 x2 指向同一个地址,重复如上的指令模式,观察到多少条 ldr 指令时会出现性能下降,在 Firestorm 上测试:
数据依赖没有明显的阈值,但从 84 开始出现了一个小的增长,且斜率不为零;地址依赖的阈值是 70。
Icestorm:
数据依赖和地址依赖的阈值都是 13。
Store to Load Forwarding¶
Firestorm¶
经过实际测试,Firestorm 上如下的情况可以成功转发,对地址 x 的 Store 转发到对地址 y 的 Load 成功时 y-x 的取值范围:
| Store\Load | 8b Load | 16b Load | 32b Load | 64b Load |
|---|
| 8b Store | {0} | [-1,0] | [-3,0] | [-7,0] |
| 16b Store | [0,1] | [-1,1] | [-3,1] | [-7,1] |
| 32b Store | [0,3] | [-1,3] | [-3,3] | [-7,3] |
| 64b Store | [0,7] | [-1,7] | [-3,7] | [-7,7] |
从上表可以看到,所有 Store 和 Load Overlap 的情况,无论地址偏移,都能成功转发。甚至在 Load 或 Store 跨越 64B 缓存行边界时,也可以成功转发,代价是多一个周期。
一个 Load 需要转发两个、四个甚至八个 Store 的数据时,如果数据跨越缓存行,则不能转发,但其他情况下,无论地址偏移,都可以转发,只是比从单个 Store 转发需要多耗费 1-4 个周期。
成功转发时 7.5 cycle,跨缓存行且转发失败时 28+ cycle。
小结:Apple Firestorm 的 Store to Load Forwarding:
- 1 ld + 1 st: 支持
- 1 ld + 2 st: 支持,要求不跨越 64B 边界
- 1 ld + 4 st: 支持,要求不跨越 64B 边界
- 1 ld + 8 st: 支持,要求不跨越 64B 边界
Icestorm¶
在 Icestorm 上,如果 Load 和 Store 访问范围出现重叠,则需要 10 Cycle,无论是和几个 Store 重叠,也无论是否跨缓存行。
Load to use latency¶
Firestorm¶
实测 Firestorm 的 Load to use latency 针对 pointer chasing 场景做了优化,在下列的场景下可以达到 3 cycle:
ldr x0, [x0]: load 结果转发到基地址,无偏移ldr x0, [x0, 8]:load 结果转发到基地址,有立即数偏移ldr x0, [x0, x1]:load 结果转发到基地址,有寄存器偏移ldp x0, x1, [x0]:load pair 的第一个目的寄存器转发到基地址,无偏移
如果访存跨越了 8B 边界,则退化到 4 cycle。
在下列场景下 Load to use latency 则是 4 cycle:
- load 的目的寄存器作为 alu 的源寄存器(下称 load to alu latency)
ldr x0, [sp, x0, lsl #3]:load 结果转发到 indexldp x1, x0, [x0]:load pair 的第二个目的寄存器转发到基地址,无偏移
Icestorm¶
实测 Icestorm 的 Load to use latency 针对 pointer chasing 场景做了优化,在下列的场景下可以达到 3 cycle:
ldr x0, [x0]: load 结果转发到基地址,无偏移ldr x0, [x0, 8]:load 结果转发到基地址,有立即数偏移ldr x0, [x0, x1]:load 结果转发到基地址,有寄存器偏移ldp x0, x1, [x0]:load pair 的第一个目的寄存器转发到基地址,无偏移
如果访存跨越了 8B/16B/32B 边界,依然是 3 cycle;跨越了 64B 边界则退化到 7 cycle。
在下列场景下 Load to use latency 则是 4 cycle:
- load 的目的寄存器作为 alu 的源寄存器(下称 load to alu latency)
ldr x0, [sp, x0, lsl #3]:load 结果转发到 indexldp x1, x0, [x0]:load pair 的第二个目的寄存器转发到基地址,无偏移
Virtual Address UTag/Way-Predictor¶
Linear Address UTag/Way-Predictor 是 AMD 的叫法,但使用相同的测试方法,也可以在 Apple M1 上观察到类似的现象,猜想它也用了类似的基于虚拟地址的 UTag/Way Predictor 方案,并测出来它的 UTag 也有 8 bit,Firestorm 和 Icestorm 都是相同的:
- VA[14] xor VA[22] xor VA[30] xor VA[38] xor VA[46]
- VA[15] xor VA[23] xor VA[31] xor VA[39] xor VA[47]
- VA[16] xor VA[24] xor VA[32] xor VA[40]
- VA[17] xor VA[25] xor VA[33] xor VA[41]
- VA[18] xor VA[26] xor VA[34] xor VA[42]
- VA[19] xor VA[27] xor VA[35] xor VA[43]
- VA[20] xor VA[28] xor VA[36] xor VA[44]
- VA[21] xor VA[29] xor VA[37] xor VA[45]
一共有 8 bit,由 VA[47:14] 折叠而来。
执行单元¶
想要测试有多少个执行单元,每个执行单元可以运行哪些指令,首先要测试各类指令在无依赖情况下的的 IPC,通过 IPC 来推断有多少个能够执行这类指令的执行单元;但由于一个执行单元可能可以执行多类指令,于是进一步需要观察在混合不同类的指令时的 IPC,从而推断出完整的结果。
Firestorm¶
在 Firestorm 上测试如下各类指令的延迟和每周期吞吐:
| 指令 | 延迟 | 吞吐 |
|---|
| asimd int add | 2 | 4 |
| asimd aesd/aese | 3 | 4 |
| asimd aesimc/aesmc | 2 | 4 |
| asimd fabs | 2 | 4 |
| asimd fadd | 3 | 4 |
| asimd fdiv 64b | 10 | 1 |
| asimd fdiv 32b | 8 | 1 |
| asimd fmax | 2 | 4 |
| asimd fmin | 2 | 4 |
| asimd fmla | 4 | 4 |
| asimd fmul | 4 | 4 |
| asimd fneg | 2 | 4 |
| asimd frecpe | 3 | 1 |
| asimd frsqrte | 3 | 1 |
| asimd fsqrt 64b | 13 | 0.5 |
| asimd fsqrt 32b | 10 | 0.5 |
| fp cvtf2i (fcvtzs) | - | 2 |
| fp cvti2f (scvtf) | - | 3 |
| fp fabs | 2 | 4 |
| fp fadd | 3 | 4 |
| fp fdiv 64b | 10 | 1 |
| fp fdiv 32b | 8 | 1 |
| fp fjcvtzs | - | 1 |
| fp fmax | 2 | 4 |
| fp fmin | 2 | 4 |
| fp fmov f2i | - | 2 |
| fp fmov i2f | - | 3 |
| fp fmul | 4 | 4 |
| fp fneg | 2 | 4 |
| fp frecpe | 3 | 1 |
| fp frecpx | 3 | 1 |
| fp frsqrte | 3 | 1 |
| fp fsqrt 64b | 13 | 0.5 |
| fp fsqrt 32b | 10 | 0.5 |
| int add | 1 | 4.6 |
| int addi | 1 | 6 |
| int bfm | 1 | 1 |
| int crc | 3 | 1 |
| int csel | 1 | 3 |
| int madd (addend) | 1 | 1 |
| int madd (others) | 3 | 1 |
| int mrs nzcv | - | 2 |
| int mul | 3 | 2 |
| int nop | - | 8 |
| int sbfm | 1 | 4.7 |
| int sdiv | 7 | 0.5 |
| int smull | 3 | 2 |
| int ubfm | 1 | 4.7 |
| int udiv | 7 | 0.5 |
| not taken branch | - | 2 |
| taken branch | - | 1 |
| mem asimd load | - | 3 |
| mem asimd store | - | 2 |
| mem int load | - | 3 |
| mem int store | - | 2 |
从上面的结果可以初步得到的信息:
- 标量浮点和 ASIMD 吞吐最大都是 4,意味着有 4 个浮点/ASIMD 执行单元,但并非完全对称,例如 fdiv/frecpe/frecpx/frsqrte/fsqrt/fjcvtzs 由于吞吐不超过 1,大概率只能在一个执行单元内执行。但这些指令是不是都只能在同一个执行单元内执行,还需要进一步的测试
- 浮点和整数之间的 move 或 convert 指令,fmov i2f/cvti2f 吞吐是 3,fmov f2i/cvtf2i 吞吐是 2,那么这些指令是在哪个执行单元里实现的,是否需要同时占用整数执行单元和浮点执行单元,需要进一步测试
- 整数方面,根据吞吐,推断出如下几类指令对应的执行单元数量:
- ALU: 6
- CSEL: 3
- Mul/Br/MRS NZCV: 2
- CRC/BFM/MAdd/Div: 1
- 虽然 Br 的吞吐可以达到 2,但是每周期只能有一个 taken branch;目前一些架构可以做到每周期超过一个 taken branch,此时 Br 的吞吐一般会给到 3
- 访存方面,每周期最多 3 Load 或者 2 Store
首先来看浮点和 ASIMD 单元,根据上面的信息,认为至少有 4 个执行单元,每个执行单元都可以做这些操作:asimd int add/aes/fabs/fadd/fmax/fmin/fmla/fmul/fneg,下面把这些指令称为 basic fp/asimd ops + aes。接下来要判断,fmov f2i/fmov i2f/fdiv/frecpe/frecpx/frsqrte/fsqrt 由哪些执行单元负责执行,方法是把这些指令混合起来测试吞吐(此处的吞吐不代表 CPI,而是每周能够执行多少次指令组合,例如用 2 条指令的组合测试,那么吞吐等于 CPI 除以 2):
| 指令 | 吞吐 |
|---|
| fp fdiv + fp frecpe | 0.5 |
| fp fdiv + fp frecpx | 0.5 |
| fp fdiv + fp frsqrte | 0.5 |
| fp fdiv + fp fsqrt | 0.33=1/3 |
| fp fdiv + fmov f2i | 1 |
| fp fdiv + 2x fmov f2i | 0.67=1/1.50 |
| fp fdiv + 3x fmov i2f | 1 |
| fp fdiv + 4x fmov i2f | 0.75=1/1.33 |
| fmov i2f + 4x fp fadd | 1 |
| fmov f2i + 4x fp fadd | 0.67=1/1.50 |
根据以上测试结果,可以得到如下的推论:
- fp fdiv/frecpe/frecpx/frsqrte 混合的时候,吞吐只有一半,IPC 不变,说明这些指令在同一个执行单元中,混合并不能带来更高的 IPC
- fp fdiv 和 fp fsqrt 混合时,吞吐下降到 0.33 一个不太整的数字,猜测是因为它们属于同一个执行单元内的不同流水线,抢占寄存器堆写口
- fp fdiv + fmov f2i 的时候吞吐是 1,而 fdiv + 2x fmov f2i 时吞吐下降到 0.67,IPC 维持在 2,说明有两个执行单元,都可以执行 fmov f2i,但只有其中一个可以执行 fp fdiv,导致 fdiv + 2x fmov f2i 的时候会抢执行单元
- fp fdiv + 3x fmov i2f 的时候吞吐是 1,而 fdiv + 4x fmov i2f 时吞吐下降到 0.75,此时每周期还是执行 3 条 fmov i2f 指令,意味着 fdiv 没有抢占 fmov i2f 的执行单元,它们用的执行单元是独立的
- fmov i2f + 4x fp fadd 的时候吞吐是 1,说明 fmov i2f 没有抢占 fp fadd 的执行单元
推断这四个执行单元支持的操作:
- basic fp/asimd ops + aes + fdiv + frecpe + frecpx + frsqrte + fsqrt + fmov f2i + cvtf2i
- basic fp/asimd ops + aes + fmov f2i + cvtf2i
- basic fp/asimd ops + aes
- basic fp/asimd ops + aes
当然还有很多指令没有测,不过原理是一样的。
访存部分,前面已经在测 LSU 的时候测过了,每周期 Load + Store 不超过 4 个,其中 Load 不超过 3 个,Store 不超过 2 个。虽然从 IPC 的角度来看 LSU 的 Load/Store Pipe 未必准确,比如可能它发射和提交的带宽是不同的,但先暂时简化为如下的执行单元:
- load + store
- load
- load
- store
最后是整数部分。从 addi 的指令来看,有 6 个 ALU,能够执行基本的整数指令(add/ubfm/sbfm 的吞吐有时候测出来 4.6-4.7,有时候测出来 6,怀疑是进入了什么低功耗模式)。但其他很多指令可能只有一部分执行单元可以执行:bfm/crc/csel/madd/mrs nzcv/mul/div/branch/fmov i2f。为了测试这些指令使用的执行单元是否重合,进行一系列的混合指令测试,吞吐的定义和上面相同:
| 指令 | 吞吐 |
|---|
| 3x int csel + 3x fmov i2f | 1 |
| 3x int csel + 2x fmov f2i | 0.75=1/1.33 |
| 3x int csel + int bfm | 1 |
| 3x int csel + int crc | 1 |
| 3x int csel + int madd | 1 |
| 3x int csel + int mul | 1 |
| 3x int csel + int sdiv | 0.5 |
| 3x int csel + mrs nzcv | 0.75=1/1.33 |
| 3x int csel + not taken branch | 0.75=1/1.33 |
| mrs nzcv + not taken branch | 1 |
| mrs nzcv + 2x not taken branch | 0.67=1/1.50 |
| 2x fmov f2i + 2x not taken branch | 1 |
| 2x fmov f2i + 2x int mul | 1 |
| int madd + 2x int mul | 0.67=1/1.50 |
| int madd + int sdiv | 0.5 |
| int madd + int crc | 0.5 |
根据上述结果分析:
- 吞吐与不混合时相同,代表混合的指令对应的执行单元不重合
- 3x int csel + 2x fmov f2i 的 IPC 等于 4,意味着有四个执行单元,其中有三个可以执行 int csel,两个可以执行 fmov f2i,也就意味着其中有一个执行单元可以执行 int csel 和 fmov f2i,即有这样的四个执行单元:
- alu + csel
- alu + csel
- alu + csel + fmov f2i
- alu + fmov f2i
- 3x int csel + mrs nzcv/not taken branch 的 IPC 等于 3,说明它们的执行单元是重合的;又因为 2x fmov f2i + 2x not taken branch 的吞吐是 1,说明它们的执行单元不重合,那么上述四个执行单元只能是:
- alu + csel + branch
- alu + csel + branch
- alu + csel + fmov f2i
- alu + fmov f2i
- mrs nzcv + 2x not taken branch 的 IPC 等于 2,说明它们的执行单元是重合的,那么上述四个执行单元是:
- alu + csel + branch + mrs nzcv
- alu + csel + branch + mrs nzcv
- alu + csel + fmov f2i
- alu + fmov f2i
- csel 和 mul 不重合,f2i 和 mul 也不重合,说明 mul 在剩下的两个执行单元内:
- alu + csel + branch + mrs nzcv
- alu + csel + branch + mrs nzcv
- alu + csel + fmov f2i
- alu + fmov f2i
- alu + mul
- alu + mul
- madd 和 mul 重合,madd 和 crc 重合,那么:
- alu + csel + branch + mrs nzcv
- alu + csel + branch + mrs nzcv
- alu + csel + fmov f2i
- alu + fmov f2i
- alu + mul + madd + crc
- alu + mul
得到初步的结果:
- alu + csel + branch + mrs nzcv
- alu + csel + branch + mrs nzcv
- alu + csel + fmov f2i
- alu + fmov f2i
- alu + mul + madd + crc
- alu + mul
还有很多其他的指令没有测试,不过方法是类似的。从上面的结果里,可以看到一些值得一提的点:
- fmov f2i 同时占用了浮点执行单元和整数执行单元,这主要是为了复用寄存器堆读写口:fmov f2i 需要读浮点寄存器堆,又需要写整数寄存器堆,那就在浮点侧读寄存器,在整数侧写寄存器。
- fmov i2f 既不在浮点,也不在整数,那只能在访存了:而正好访存执行单元需要读整数,写整数或浮点,那就可以复用它的寄存器堆写口来实现 fmov i2f 的功能。
- 可见整数/浮点/访存执行单元并不是完全隔离的,例如一些微架构,整数和浮点是直接放在一起的。
小结:Firestorm 的执行单元如下:
- alu + csel + branch + mrs nzcv
- alu + csel + branch + mrs nzcv
- alu + csel + fmov f2i
- alu + fmov f2i
- alu + mul + madd + crc
- alu + mul
- load + store
- load
- load
- store
- basic fp/asimd ops + aes + fdiv + frecpe + frecpx + frsqrte + fsqrt + fmov f2i + cvtf2i
- basic fp/asimd ops + aes + fmov f2i + cvtf2i
- basic fp/asimd ops + aes
- basic fp/asimd ops + aes
Icestorm¶
接下来用类似的方法测试 Icestorm:
| 指令 | 延迟 | 吞吐 |
|---|
| asimd int add | 2 | 2 |
| asimd aesd/aese | 3 | 2 |
| asimd aesimc/aesmc | 2 | 2 |
| asimd fabs | 2 | 2 |
| asimd fadd | 3 | 2 |
| asimd fdiv 64b | 11 | 0.5 |
| asimd fdiv 32b | 9 | 0.5 |
| asimd fmax | 2 | 2 |
| asimd fmin | 2 | 2 |
| asimd fmla | 4 | 2 |
| asimd fmul | 4 | 2 |
| asimd fneg | 2 | 2 |
| asimd frecpe | 4 | 0.5 |
| asimd frsqrte | 4 | 0.5 |
| asimd fsqrt 64b | 15 | 0.5 |
| asimd fsqrt 32b | 12 | 0.5 |
| fp cvtf2i (fcvtzs) | - | 1 |
| fp cvti2f (scvtf) | - | 2 |
| fp fabs | 2 | 2 |
| fp fadd | 3 | 2 |
| fp fdiv 64b | 10 | 1 |
| fp fdiv 32b | 8 | 1 |
| fp fjcvtzs | - | 0.5 |
| fp fmax | 2 | 2 |
| fp fmin | 2 | 2 |
| fp fmov f2i | - | 1 |
| fp fmov i2f | - | 2 |
| fp fmul | 4 | 2 |
| fp fneg | 2 | 2 |
| fp frecpe | 3 | 1 |
| fp frecpx | 3 | 1 |
| fp frsqrte | 3 | 1 |
| fp fsqrt 64b | 13 | 0.5 |
| fp fsqrt 32b | 10 | 0.5 |
| int add | 1 | 3 |
| int addi | 1 | 3 |
| int bfm | 1 | 1 |
| int crc | 3 | 1 |
| int csel | 1 | 3 |
| int madd (addend) | 1 | 1 |
| int madd (others) | 3 | 1 |
| int mrs nzcv | - | 3 |
| int mul | 3 | 1 |
| int nop | - | 4 |
| int sbfm | 1 | 3 |
| int sdiv | 7 | 0.125=1/8 |
| int smull | 3 | 1 |
| int ubfm | 1 | 3 |
| int udiv | 7 | 0.125=1/8 |
| not taken branch | - | 2 |
| taken branch | - | 1 |
| mem asimd load | - | 2 |
| mem asimd store | - | 1 |
| mem int load | - | 2 |
| mem int store | - | 1 |
从上面的结果可以初步得到的信息:
- 标量浮点和 ASIMD 吞吐最大都是 2,意味着有 2 个浮点/ASIMD 执行单元,但并非完全对称,例如 fdiv/frecpe/frecpx/frsqrte/fsqrt/fjcvtzs 由于吞吐不超过 1,大概率只能在一个执行单元内执行。但这些指令是不是都只能在同一个执行单元内执行,还需要进一步的测试
- 整数方面,根据吞吐,推断出如下几类指令对应的执行单元数量:
- ALU/CSEL/MRS NZCV/SBFM/UBFM: 3
- Br: 2
- Mul/CRC/BFM/MAdd/Div: 1
- 虽然 Br 的吞吐可以达到 2,但是每周期只能有一个 taken branch
- 访存方面,每周期最多 2 Load 或者 1 Store
还是先看浮点,基本指令 add/aes/fabs/fadd/fmax/fmin/fmla/fmul/fneg 都能做到 2 的吞吐,也就是这两个执行单元都能执行这些基本指令。接下来测其余指令的混合吞吐(吞吐定义见上):
| 指令 | 吞吐 |
|---|
| fp fdiv + fp frecpe | 0.5 |
| fp fdiv + fp frecpx | 0.5 |
| fp fdiv + fp frsqrte | 0.5 |
| fp fdiv + fp fsqrt | 0.31=1/3.25 |
| fp fdiv + fmov f2i | 0.5 |
| fp fdiv + 2x fmov i2f | 1 |
| fp fdiv + 3x fmov i2f | 0.67=1/1.50 |
可见 fdiv/frecpe/frecpx/frsqrte/fsqrt/fmov f2i 都在同一个执行单元内:
- basic fp/asimd ops + aes + fdiv + frecpe + frecpx + frsqrte + fsqrt + fmov f2i
- basic fp/asimd ops + aes
还有很多指令没有测,不过原理是一样的。访存在前面测 LSU 的时候已经测过了:
- load + store
- load
最后是整数部分。从 addi 的指令来看,有 3 个 ALU,能够执行基本的整数指令。但其他很多指令可能只有一部分执行单元可以执行:bfm/crc/csel/madd/mul/div/branch。为了测试这些指令使用的执行单元是否重合,进行一系列的混合指令测试,吞吐的定义和上面相同:
| 指令 | 吞吐 |
|---|
| int madd + int mul | 0.5 |
| int madd + int crc | 0.5 |
| int madd + 2x not taken branch | 1 |
由此可见,madd/mul/crc 是一个执行单元,和 branch 的两个执行单元不重合,因此整数侧的执行单元有:
- alu + csel + mrs nzcv + branch
- alu + csel + mrs nzcv + branch
- alu + csel + mrs nzcv + madd + mul + crc
小结:Icestorm 的执行单元如下:
- alu + csel + mrs nzcv + branch
- alu + csel + mrs nzcv + branch
- alu + csel + mrs nzcv + madd + mul + crc
- load + store
- load
- basic fp/asimd ops + aes + fdiv + frecpe + frecpx + frsqrte + fsqrt + fmov f2i
- basic fp/asimd ops + aes
Scheduler¶
为了测试 Scheduler 的大小和组织方式(分布式还是集中式),测试方法是:首先用长延迟的操作堵住 ROB,接着用若干条依赖长延迟操作的指令堵住 Scheduler,当指令塞不进去的时候,就说明 Scheduler 满了。更进一步,由于现在很多处理器会引入 Non Scheduling Queue,里面的指令不会直接调度进执行单元,也不检查它依赖的操作数是否已经准备好,此时为了区分可调度部分和不可调度部分,在依赖长延迟操作的指令后面,添加若干条不依赖长延迟操作的指令,这样测出来的就是可调度部分的深度。
Firestorm¶
在 Firestorm 上测试,结果如下:
| 指令 | 可调度 + 不可调度 | 可调度 |
|---|
| ld | 58 | 48 |
| st | 58 | 43 |
| alu | 158 | 134 |
| fp | 156 | 144 |
| crc | 40 | 28 |
| idiv | 40 | 28 |
| bfm | 40 | 28 |
| fjcvtzs | 42 | 36 |
| fmov f2i | 84 | 72 |
| csel | 76 | 64 |
| mrs nzcv | 62 | 50 |
首先看浮点:
- 可调度部分 fp 是 144,fmov f2i 是 72,fjcvtzs 是 36,有明显的 4:2:1 的关系
- fp/fmov f2i/fjcvtzs 吞吐刚好也是 4:2:1 的关系
- 因此四个执行单元前面各有一个独立的 36 entry 的 Scheduler
- 不可调度部分,156-144=12,84-72=12,42-36=6,猜测有两个 Non Scheduling Queue,每个 Non Scheduling Queue 6 entry,分别对应两个 Scheduler
下面是访存部分,load 和 store 总数一样但 Scheduler 差了 5,不确定是测试误差还是什么问题,暂且考虑为一个统一的 Scheduler 和同一个 Non Scheduling Queue。
最后是整数部分,由于有 6 个整数执行单元,情况会比较复杂:
- 可调度部分 alu 一共是 134,其中 csel 是 64,crc/idiv/bfm 都是 28,mrs nzcv 是 50,结合六个整数执行单元,可以得到这六个执行单元对应的 Scheduler 大小关系:
- alu + csel + branch + mrs nzcv: x entries
- alu + csel + branch + mrs nzcv: 50-x entries
- alu + csel + fmov f2i: 14 entries
- alu + fmov f2i: y entries
- alu + mul + madd + crc: 28 entries
- alu + mul: 42-y entries
- alu 不可调度部分是 158-134=24,crc/idiv/bfm/csel/mrs nzcv 不可调度部分都是 12,考虑到 csel 对应前三个执行单元,并且和 mrs nzcv 一样多,说明前三个执行单元共享一个 12 entry 的 Non Scheduling Queue;剩下三个执行单元共享剩下的 12 entry 的 Non Scheduling Queue
- 最后只差 x 和 y 的取值没有求出来,可以通过进一步测试来更加精确地求出
Icestorm¶
在 Icestorm 上测试,结果如下:
| 指令 | 可调度 + 不可调度 | 可调度 |
|---|
| ld | 24 | 10 |
| st | 24 | 4 |
| alu | 36 | 28 |
| crc | 16 | 8 |
| idiv | 16 | 8 |
| bfm | 16 | 8 |
| csel | 32 | 24 |
| mrs nzcv | 32 | 24 |
访存部分,load 和 store 总数一样但 Scheduler 差了 6,不确定是测试误差还是什么问题,暂且考虑为一个统一的 Scheduler 和同一个 Non Scheduling Queue。
整数部分,由于有 3 个整数执行单元,情况会比较复杂:
- 可调度部分 alu 一共是 28(多出来的 4 个不确定是什么原因),其中 csel/mrs nzcv 是 24,crc/idiv/bfm 都是 8,结合 3 个整数执行单元,可以得到这 3 个执行单元对应的 Scheduler 大小关系:
- alu + csel + mrs nzcv + branch: x entries
- alu + csel + mrs nzcv + branch: 16-x entries
- alu + csel + mrs nzcv + madd + mul + crc: 8 entries
- alu 不可调度部分是 36-28=8,crc/idiv/bfm/csel/mrs nzcv 不可调度部分都是 8,应该是 3 个整数执行单元共享一个 8 entry 的 Non Scheduling Queue
Reorder Buffer¶
Firestorm¶
Firestorm 的 ROB 采用的是比较特别的方案,它的 entry 地位不是等同的,而是若干个 entry 组合在一起,成为一个 group,每个 group 有若干个 entry,一个 group 对 group 内指令的类型和数量有要求,这就导致用传统方法测 Firestorm 的 ROB,可能会测到特别巨大的数:2200+,也可能测到比较小的数:320+,这就和指令类型有关系。为什么对指令的类型和位置有要求呢,这是为了方便处理有副作用的指令。很多指令是没有副作用的,也不会抛异常,这些指令可以比较随意地放置;但是对于有副作用的指令,retire 时是需要特殊处理的,因此一个合理的设计就是,让这些指令只能放在 group 的开头。
经过测试,发现 Firestorm 上 pointer chasing 的延迟波动比较大,目测是 prefetcher 做了针对性的优化,因此用 fsqrt chain 来做延迟,Firestorm 上一条双精度 fsqrt 的延迟是 13 个周期。构造一个循环,循环包括 M 个串行的 sqrt 和 N 个 nop,如果没有触碰到 ROB 的瓶颈,那么当 N 比较小的时候,瓶颈在串行 fsqrt 上,每次循环的周期数应该为 M*13;当 N 比较大的时候,瓶颈在每个周期执行 8 个 NOP 上(NOP 被 eliminate 了,不用进 ALU,可以打满 8 的发射宽度),每次循环的周期数应该为 N/8 再加上一个常数。
但当 N 很大的时候,可能会撞上 ROB 大小的限制。下面给出了不同的 M 取值情况下,可以保证循环周期数在 M*13 左右的最大的 N 取值:
- M=21, N <= 2109, cycle=273.74, M*13=273
- M=22, N <= 2205, cycle=286.75, M*13=286
- M=23, N <= 2269, cycle=299.76, M*13=299
- M=24, N <= 2277, cycle=312.77, M*13=312
- M=25, N <= 2275, cycle=325.77, M*13=325
- M=26, N <= 2274, cycle=338.77, M*13=338
可以看到 N 最大在 2277 附近就不能再增加了,说明遇到了 ROB 的瓶颈,预计 ROB 的所有 group 的 entry 个数加起来大概是 2277 左右。
而如果把填充的指令改成 load/store,inflight 的 load 和 store 最多都是 325 个,并且这和 load/store queue 大小无关,而 load/store 又是有副作用的,很可能是因为它们只能在 ROB 每个 group 里只能放一条,于是看起来 ROB 的容量比 2277 小了很多,只表现出 325。按照这个猜想,对二者进行除法,发现商和 7 十分接近,这大概率意味着 Firestorm 的 ROB 有 325 左右个 group,每个 group 内有 7 个 entry,每个 entry 可以放一条指令(uop)。测试里开头的 20 个 sqrt 也要占用 ROB,实际的 ROB group 数量可能比 325 略多。
结论:Firestorm 的 ROB 有大约 330 个 group,每个 group 最多保存 7 个 uop。
Icestorm¶
首先用 NOP 指令测试 Icestorm 的 ROB 大小:
可以看到拐点是 413 条指令。改成用 load/store 指令,可以测到拐点在 57 左右,根据上面的分析,认为 group 数量在 57 左右,每个 group 最多保存 7 个 uop。由于 413 / 7 = 59,认为有 59 个 group。
结论:Icestorm 的 ROB 有 59 个 group,每个 group 最多保存 7 个 uop。
L2 Cache¶
官方信息:通过 sysctl 可以看到,4 个 Firestorm 核心共享一个 12MB L2 Cache,4 个 Icestorm 核心共享一个 4MB L2 Cache:
hw.perflevel0.l2cachesize: 12582912hw.perflevel0.cpusperl2: 4hw.perflevel1.l2cachesize: 4194304hw.perflevel1.cpusperl2: 4
L2 TLB¶
Firestorm¶
从苹果提供的性能计数器来看,L1 TLB 分为指令和数据,而 L2 TLB 是 Unified,不区分指令和数据。沿用之前测试 L1 DTLB 的方法,把规模扩大到 L2 Unified TLB 的范围,就可以测出来 L2 Unified TLB 的容量,下面是 Firestorm 上的测试结果:
可以看到拐点是 3072 个 Page,说明 Firestorm 的 L2 TLB 容量是 3072 项。
把指针的跨度增大:
- 如果每 32 个页一个指针,L2 TLB 拐点前移到 96,L2 TLB 缺失时 CPI 为 36.5
- 如果每 64 个页一个指针,L2 TLB 拐点前移到 48,L2 TLB 缺失时 CPI 为 36.5
- 如果每 128 个页一个指针,L2 TLB 拐点前移到 24,L2 TLB 缺失时 CPI 为 36.5
- 如果每 256 个页一个指针,L2 TLB 拐点前移到 12,L2 TLB 缺失时 CPI 为 35
- 如果每 512 个页一个指针,L2 TLB 拐点依然在 12,L2 TLB 缺失时 CPI 为 35
- 观察到命中 L1 DTLB 时 CPI 是 3,命中 L2 TLB 时 CPI 是 9,L2 TLB 缺失时 CPI 是 35-36.5,此时缓存缺失率为 0
认为 Firestorm 的 L2 TLB 是 12 Way,256 Set,Index 位是 VA[21:14]。
Icestorm¶
在 Icestorm 上测试:
可以看到拐点是 1024 个 Page,说明 Icestorm 的 L2 TLB 容量是 1024 项。
把指针的跨度增大:
- 如果每 32 个页一个指针,L2 TLB 拐点前移到 32,L2 TLB 缺失时 CPI 为 33
- 如果每 64 个页一个指针,L2 TLB 拐点前移到 16,L2 TLB 缺失时 CPI 为 32
- 如果每 128 个页一个指针,L2 TLB 拐点前移到 8,L2 TLB 缺失时 CPI 为 32
- 如果每 256 个页一个指针,L2 TLB 拐点前移到 4 和 L1 DTLB 拐点重合,一旦 L1 DTLB 缺失,L2 TLB 也缺失,L2 TLB 缺失时 CPI 为 32
- 观察到命中 L1 DTLB 时 CPI 是 3,命中 L2 TLB 时 CPI 是 10,L2 TLB 缺失时 CPI 是 32-33,此时缓存缺失率为 0
由于 Icestorm 的 L1 DTLB 就是 4 Way,不确定 Icestorm 的 L2 TLB 组相连是 1/2/4 Way 的哪一种,假如是 4 Way,那么 Icestorm 的 L2 TLB 是 4 Way,256 Set,Index 位是 VA[21:14]。